NXP’s new
LPC553x
expands the LPC5500 MCU series based on the Arm®
Cortex®-M33 technology, featuring precision analog peripherals
and motor control peripherals. On chip, it has up to 256KB of Flash memory,
128KB RAM with parity and error correction code (ECC) plus the external
Serial/Quad/Octal memory controller and FlexSPI supporting memory expansion
with on-the-fly encryption and decryption.
These refreshing details are paired with up to 8 Flexcomm (choice of any 8
serial –I2C/UART/SPI), one dedicated 50MHz SPI, FS USB host/device and CAN FD.
The four single ended (or two differential) 16-bit ADC supports two
independent conversions simultaneously at 2 MSPS or 3.3 MSPS in 12-bit mode
and there are up to 23 ADC input channels. The 4 comparators have up to 5
input pins, three 12-bit DAC, three precision operational amplifiers with
settings for programmable gain amp and a precision internal reference voltage.
The motor control subsystem has two flexible pulse width modulation (PWM)
modules providing up to 12 PWM outputs, 2 Quadrature encoder/decoder inputs
and 2 and/or/invert (AOI) modules for direct feed into peripherals for fast
response. In addition, a tightly coupled digital signal processor (DSP) and
math accelerator (PowerQuad) support trigonometric and CORDIC functions used
in motor control algorithms.
Motor Control Implementation Using LPC553x
The complex motor control algorithms implemented using the Arm®
Cortex®-M33 in combination with PowerQuad outperform algorithms
using the common microcontroller software interface standard (CMSIS) DSP
library. In addition, an example of how the AOI modules enable a direct
connection between the peripherals and the input/output pins completing the
motor control subsystem.
Start Your Build Today.
Explore the MCUXpresso SDK motor control example for
LPCXpresso55S36.
Improved System Performance and PowerQuad Supports Motor Control Applications
The LPC553x added 8KB LP cache to accelerate access to the on chip Flash. The
LP cache is an 8-way, 4-set-associative write-through design. It supports a
total of 8KB cache for a 32-bit wide cache datapath and optimized for run
power operation. With this cache, the Coremark performance has achieved a
>4/MHz (Iterations/s) executing from Flash.
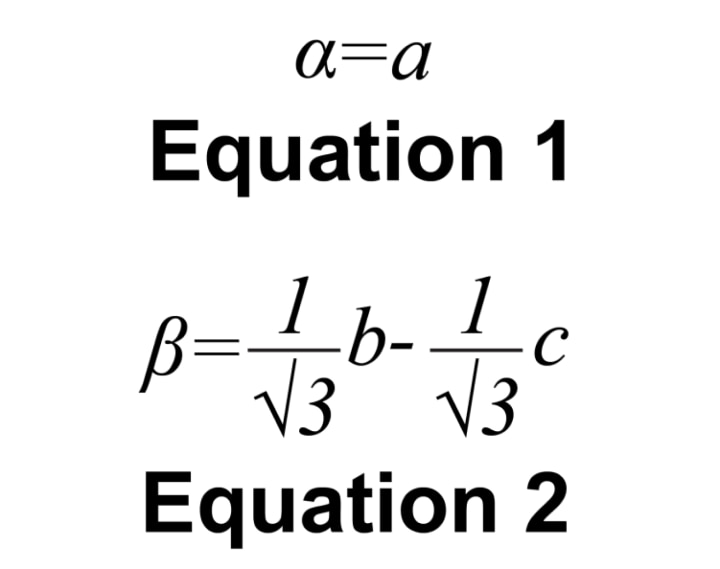
Clarke transformation, which is used to transform values (flux, voltage,
current) from the three-phase coordinate system to the two-phase (α-β)
orthogonal coordinate system, according to the following equations:
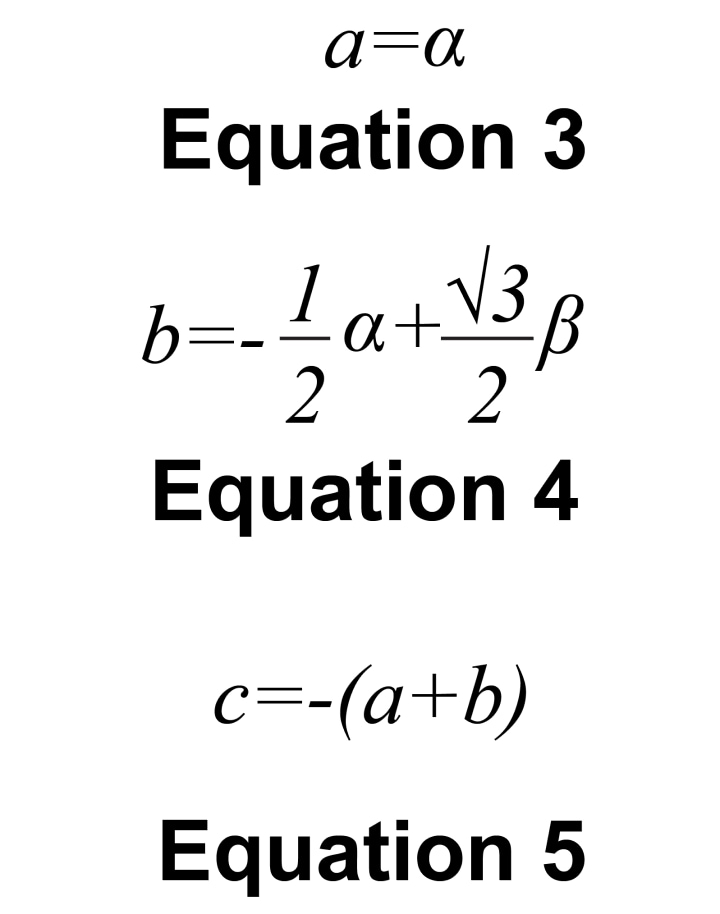
The transformation from two axis orthogonal stationary reference frame to the
three phase stator stationary reference frame, is accomplished using the
inverse Clarke transformation. The inverse Clarke transformation is expressed
by the following equations:
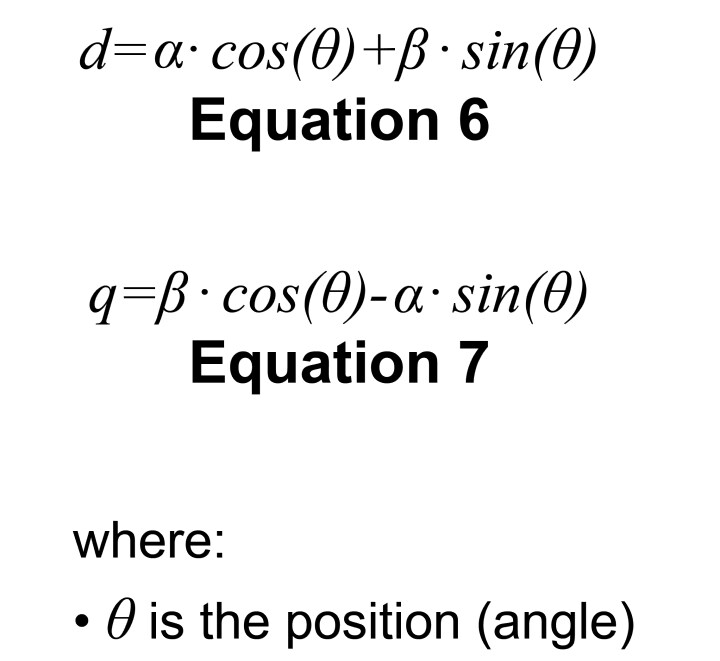
The Park transformation, which transforms values (flux, voltage, current) from
the stationary two-phase (α-β) orthogonal coordinate system to the rotating
two-phase (d-q) orthogonal coordinate system, according to the following
equations:
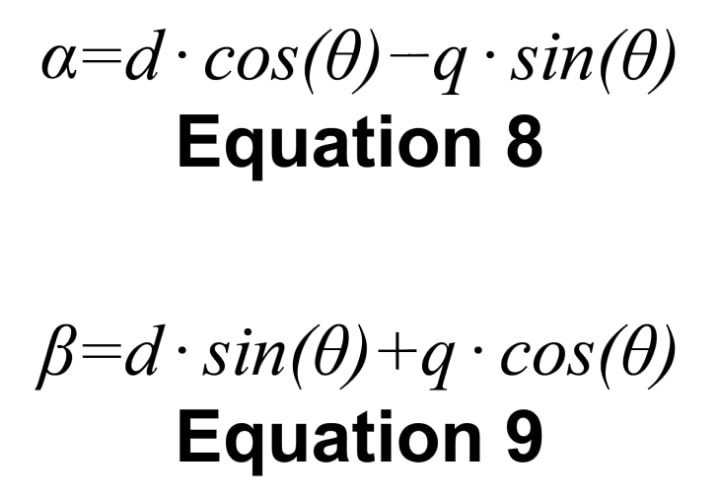
The Inverse Park transformation, which transforms values (flux, voltage,
current) from the rotating two-phase (d-q) orthogonal coordinate system to the
stationary two-phase (α-β) coordinate system, according to the following
equations:
Reference Doc:
GMCLIB User’s Guide Arm® Cortex®-M33F
Using the NXP real time control embedded software motor control and power
conversion libraries
RTCESL software support for the above motor control algorithms can be implemented using
the standard CMSIS DSP library and/or the PowerQuad (PQ) DSP accelerator in
the LPC553x.
The PQ performance versus the standard
CM33 CMSIS DSP library
can be seen below:
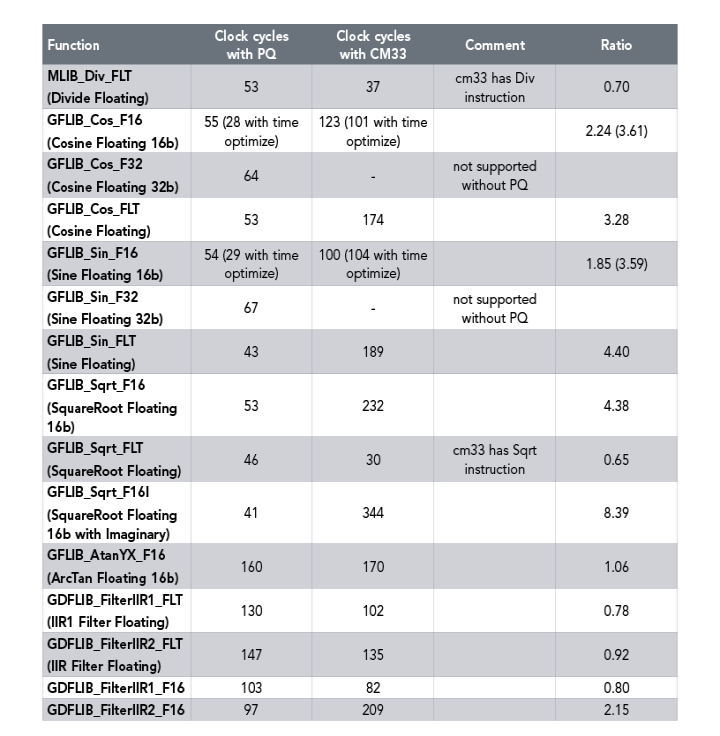 This chart shows the functions where CM33 doesn’t have an instruction and
the PQ implementation has an advantage.
This chart shows the functions where CM33 doesn’t have an instruction and
the PQ implementation has an advantage.
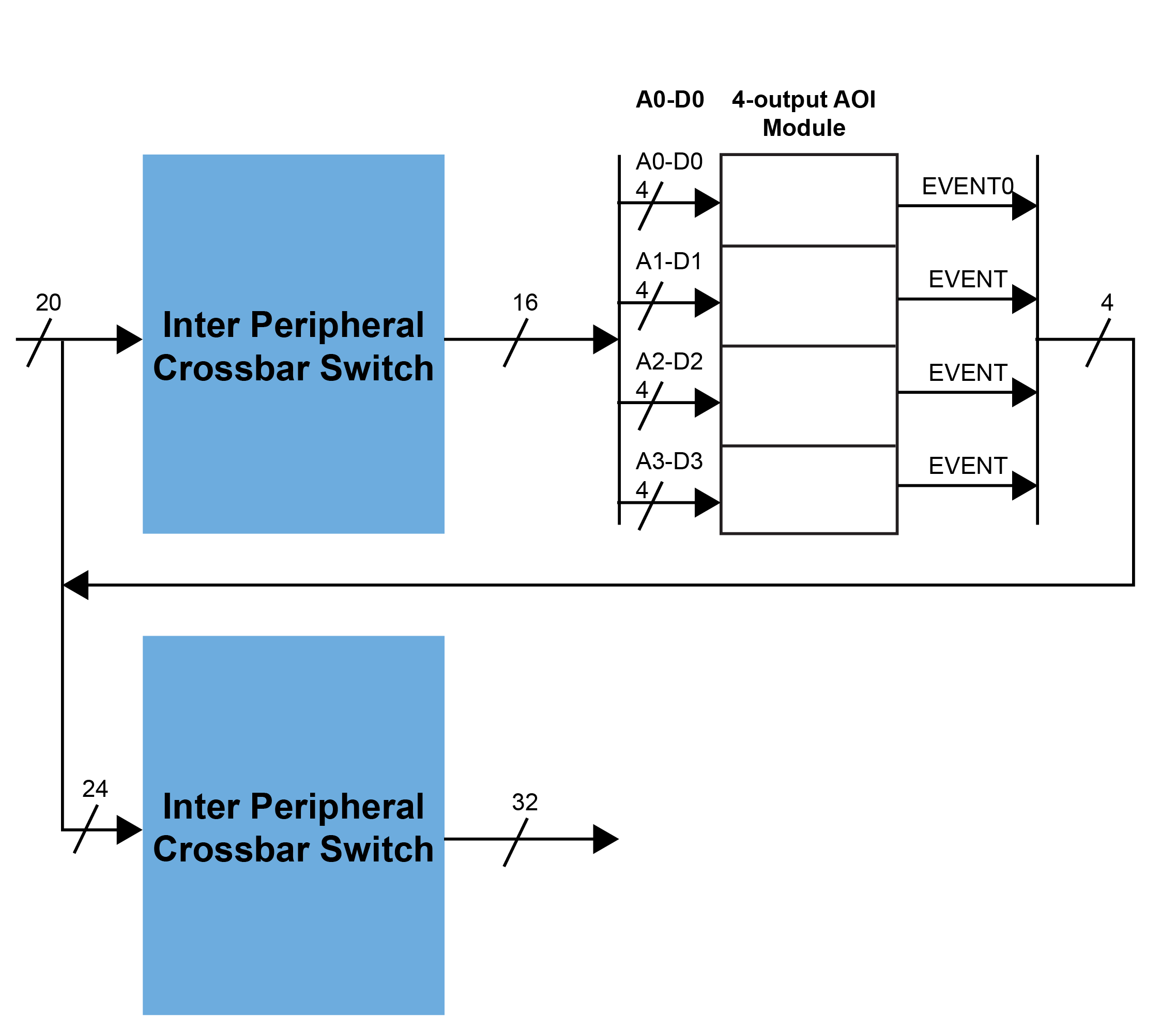
Using the And/Or/Invert (AOI) and Crossbar Modules for Fast Response to Events
To enable fast response to special/time critical events, the LPC553x is
equipped with two crossbar switches and AOI modules. Any input pins and
peripherals input/outputs can be connected to the two crossbar switches XBARA
and XBARB, with combination logic AOI modules. A generic overview as follows:
The 20 inputs at the XBARA (shared with XBARB) allow selections from
peripherals or a dedicated pin. Up to 16 outputs from the XBARA can be
connected to the input of the AOI, forming the combinational logic. The 4
outputs of the AOI can be also added onto the XBARB, forming the 32 total
outputs.
The AOI controller is a peripheral module connecting event input indicators
from a variety of device modules and generating event output signals that can
be routed to an inter-peripheral crossbar switch or other peripherals. Its
programming model is accessed through the standard IPS (Sky Blue) interface.
Each EVENTn output of the AOI module is a combination function of its four
dedicated inputs (An, Bn, Cn and Dn). Propagation time through the AOI and any
associated inter-peripheral crossbar switch modules is one bus clock cycle.
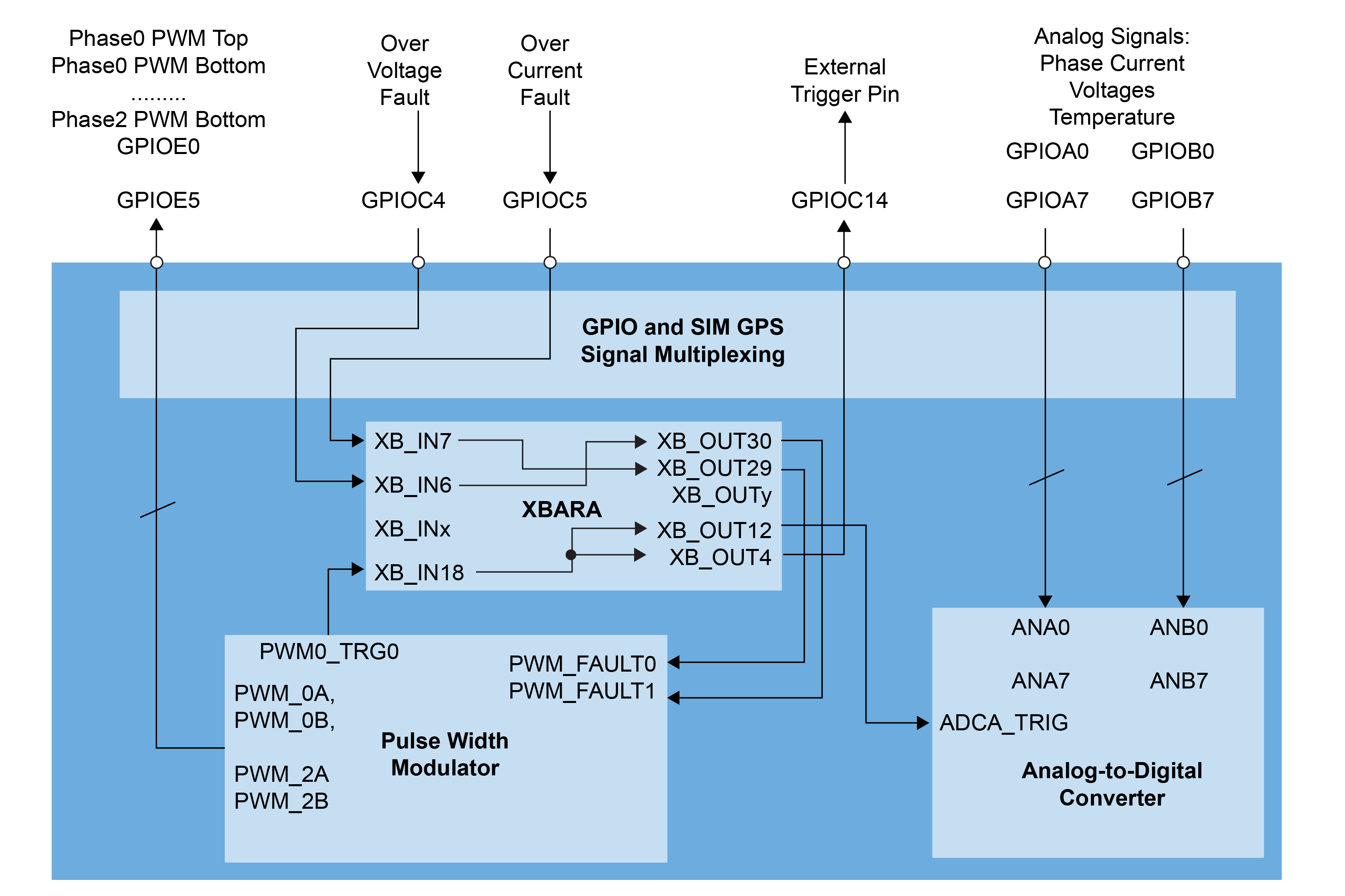
Here’s an example of motor control implementation using XBAR and GPIO module:
Through the programming of the XBARA and GPIO module, specific response to
fault events like overcurrent and voltage can be handled immediately (one bus
clock cycle).
Bring New Levels of Analog Integration and High System Reliability to Your
Design
In the latest advancement of the LPC5500 MCU series, the LPC553x not only
expands, but improves on latest editions in multiple ways. Many new updates to
the series are included in the
LP553X family, such as increased memory capabilities, additional outputs and quicker
input/output response times.