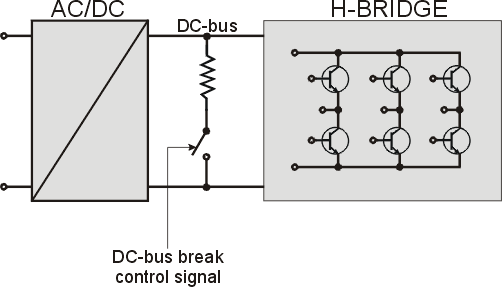
Break Controller (BC) eTPU Function
The BC function is useful for controlling the DC-bus break. The DC-bus break is required when a motor is driven, not only in the motoring mode, but also in the generating mode. The BC function generates the DC-bus break control signal, based on the actual DC-bus voltage.
The BC function can operate in the following switching modes:
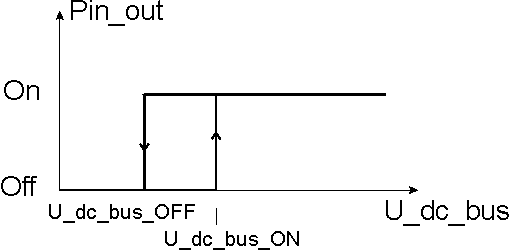
ON/OFF Mode
In this mode, the BC function turns the control signal on when the DC-bus voltage exceeds the u_dc_bus_ON threshold, and turns the control signal off when the DC-bus voltage falls behind the u_dc_bus_OFF threshold.
PWM Mode
In this mode, the BC function switches softly using a PWM signal. The u_dc_bus_ON and u_dc_bus_OFF thresholds define a ramp. When the DC-bus v