


User Guide (2)
-
PX4 Development Guide[DG-PX4-RDDRONE-FMURT6-LINK]Getting Started
-
HoverGames drone developer guide[DG-RDDRONE-FMURT6-LINK]Getting Started
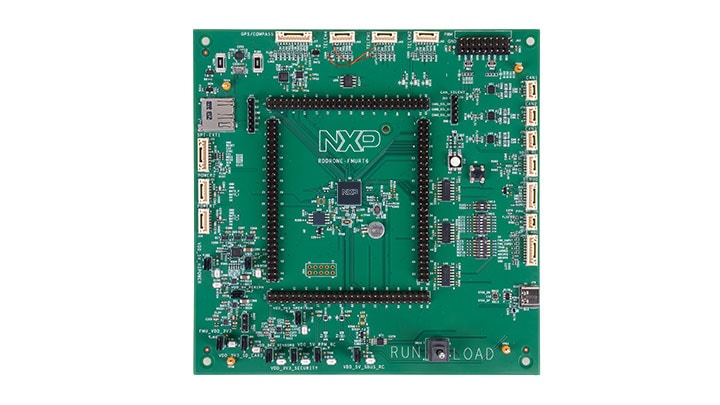
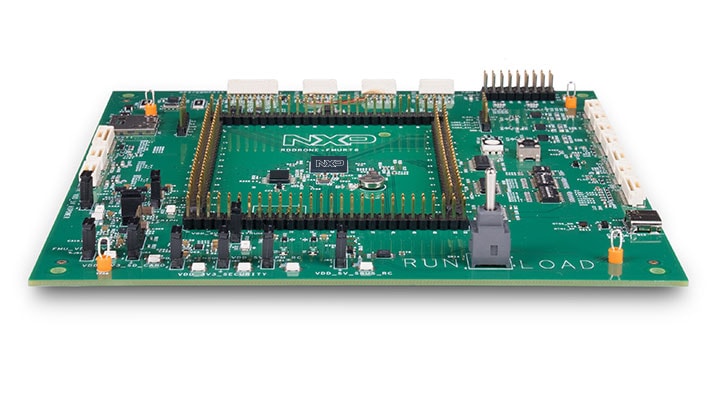
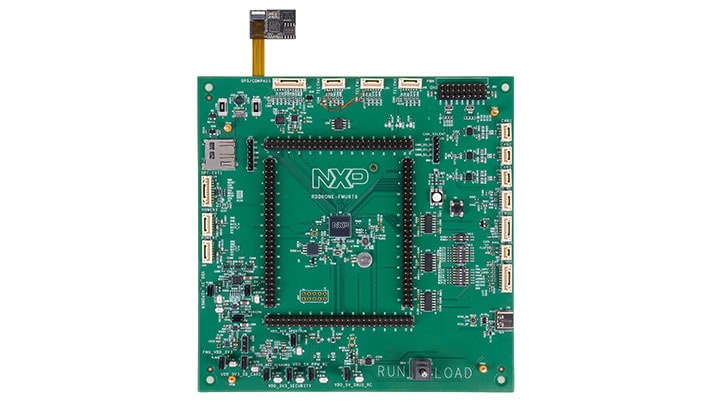
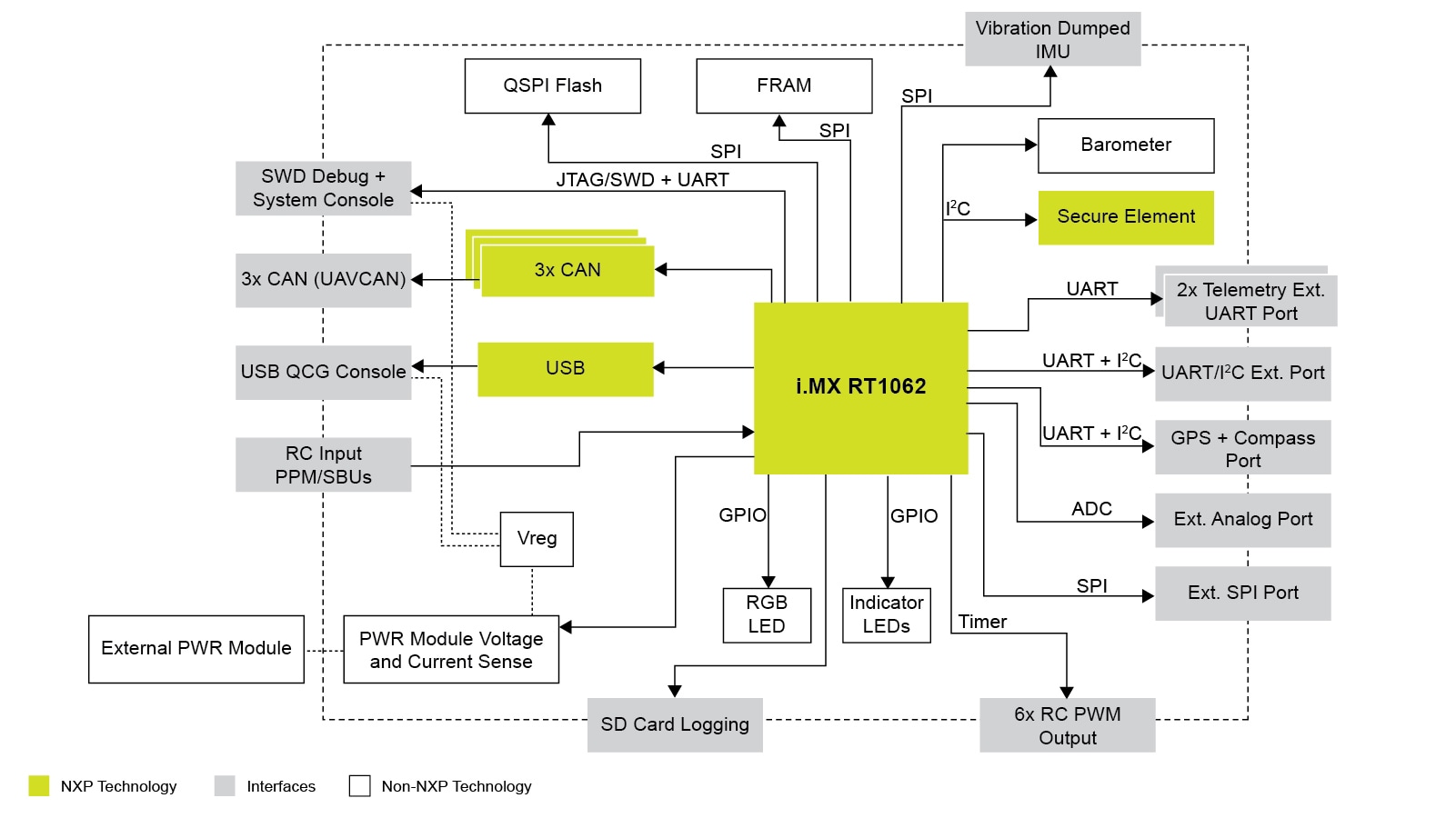
Based on the PX4 FMUv5 standard, the RDDRONE-FMURT6 flight management unit breakout development board is the foundation for building high-volume, cost sensitive mobile robotic drones, rovers and other small autonomous vehicles. (Important: see also FMURT1176 design).
Note that TWO designs are included here. One large breakout board design, and one Pixhawk form factor design with the RT1062 MCU on a SOM or "cube" module. This cube module is Pixhawk V5x compatible and will fit carrier boards from other Pixhawk vendors.
There are some limitations running the full PX4 flight stack, but the design remains versatile and suitable for investigation. Other vehicle control stacks based on Zephyr such as Cognipilot, or distributed PX4 architectures may also be developed. The open, extensible platform provides standard sensor fusion algorithms required for autonomous navigation while flexibly supporting additional sensors, GPS modules and other application-specific inputs.
Quick reference to our documentation types
2 documents
Compact List
2 design files