Getting Started with FRDM-A-S32M276 Development Board Setup and Programming
Contents of this document
-
Out of the Box
-
Get Software
-
Plug It In
-
Build, Run
Sign in to save your progress. Don't have an account? Create one.
Purchase your FRDM Automotive S32M276 Development Board
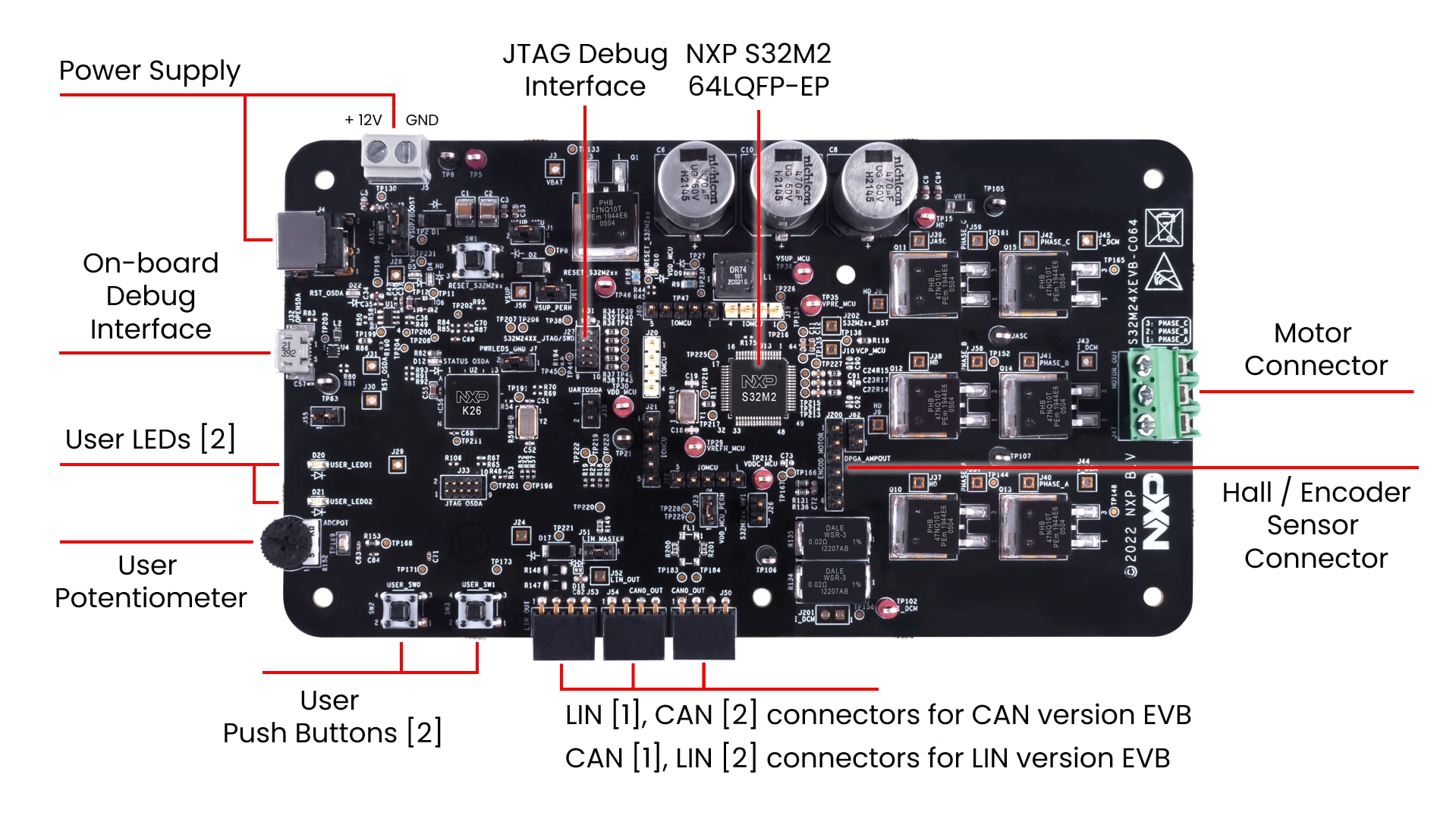
1. Out of the Box
2. Get Software
Sign in at NXP with your credentials.
2.1 Install Software
- Go to the software bundle using the following link FRDM Automotive Bundle
- Click Generate to download
-
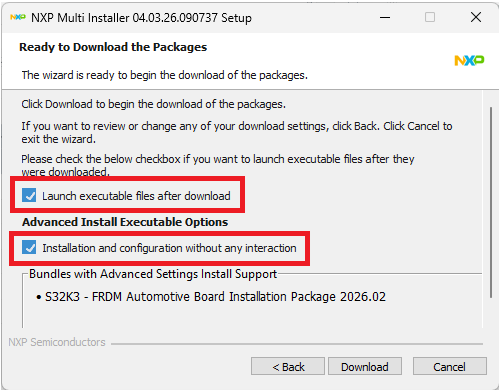
Run the NXP Multi Installer
By selecting “Lauch executable after download” and “Installation and configuration without any interaction” the FRDM Bundle will be installed alongside all its available components. All the Software and Tools are now installed and configured automatically.
- Launch S32 Design Studio for S32 Platform 3.6.5 from the shortcut that has been created on your desktop
3. Plug It In
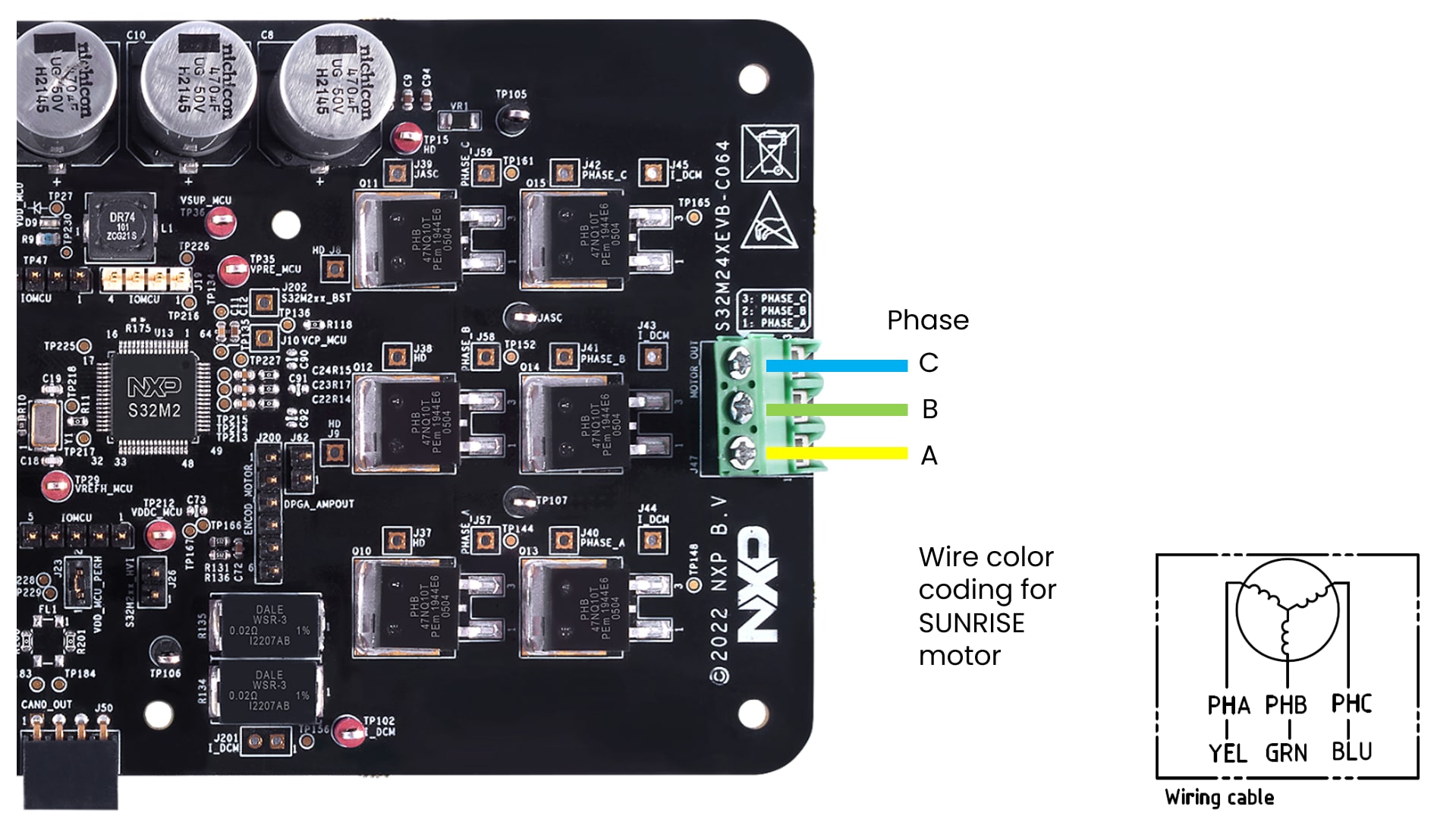
The recommended accessory kit for FRDM-A-S32M276 development board is BLDC_KIT (software developed and tuned for given motor), however you may use any suitable 3 ph motor and 12 V power supply instead.

BLDC_KIT Content:
- 95 W BLDC motor with HALL sensors Sunrise 42BLY3A78-24110
- Plexiglass
- 12 V, 5 A power supply Meanwell GST60A12-P1J
- Power supply cable with set of universal plugs
- 4 self-adhesive standoffs for any EVB Takachi AST3-10B
- Micro-USB cable
3.1 Check The Default Jumper Positions at the FRDM-A-S32M276 EVB
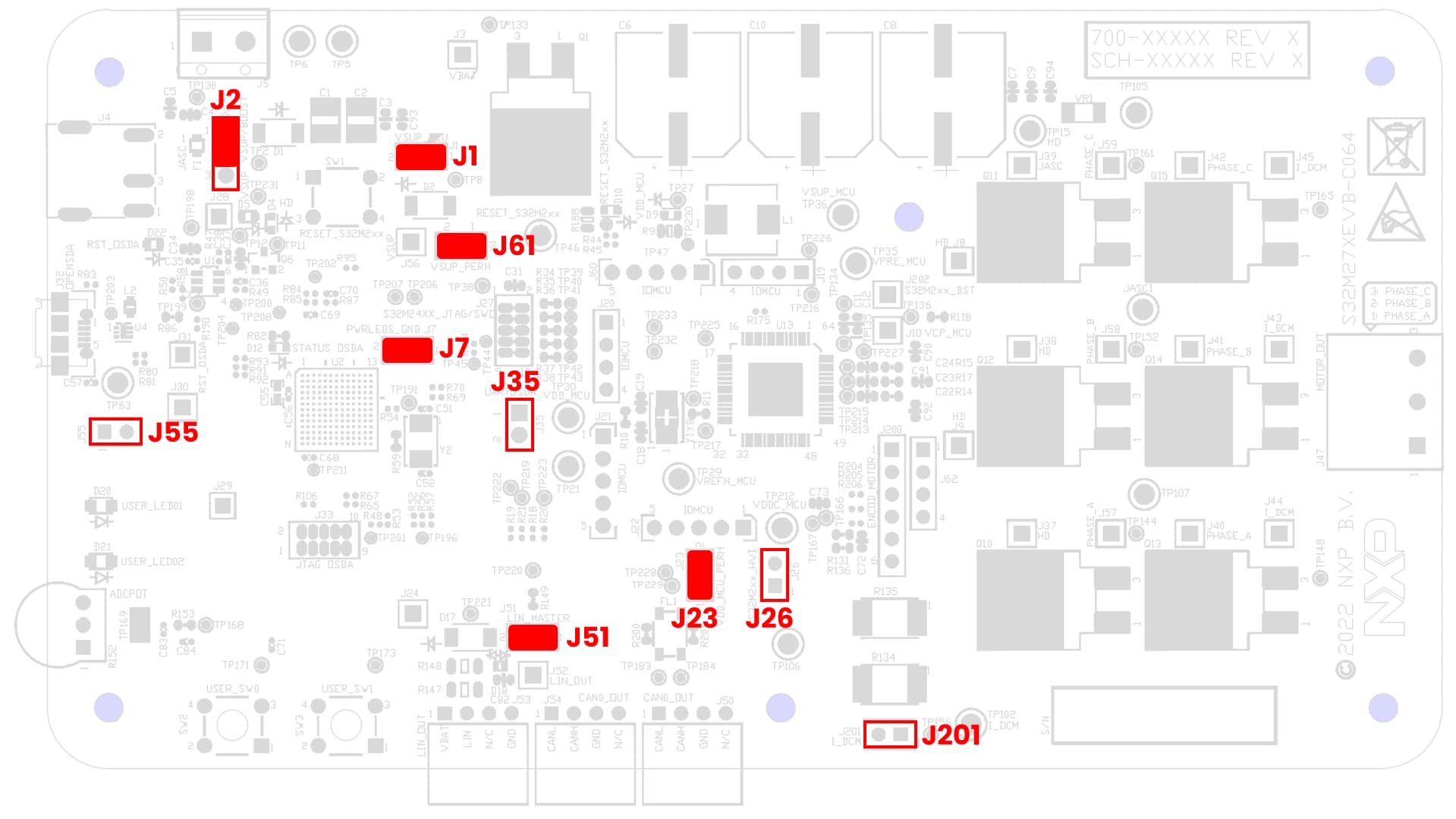
| FRDM-A-S32M276 Default Jumper Settings | ||
|---|---|---|
| Jumper | State | Notes |
J1 |
CLOSED | VSUP_MCU is routed to VSUP input of MCU |
J2 |
1-2 | VBAT is routed to VSUP. Boost Converter disconnected |
J7 |
CLOSED | Power domains LED Indicators enabled |
J23 |
CLOSED | VDD_MCU is connected to the VDD_MCU_PERH |
J26 |
OPEN | [1] High Voltage Input, [2] GND |
J35 |
OPEN | [1] LPUART0_RX, [2] LPUART0_TX |
J51 |
CLOSED | LIN Commander* mode |
J55 |
OPEN | ADC Potentiometer disabled |
J61 |
CLOSED | VSUP is routed to VSUP_PERH |
J201 |
OPEN | Current shunt voltage, not populated |
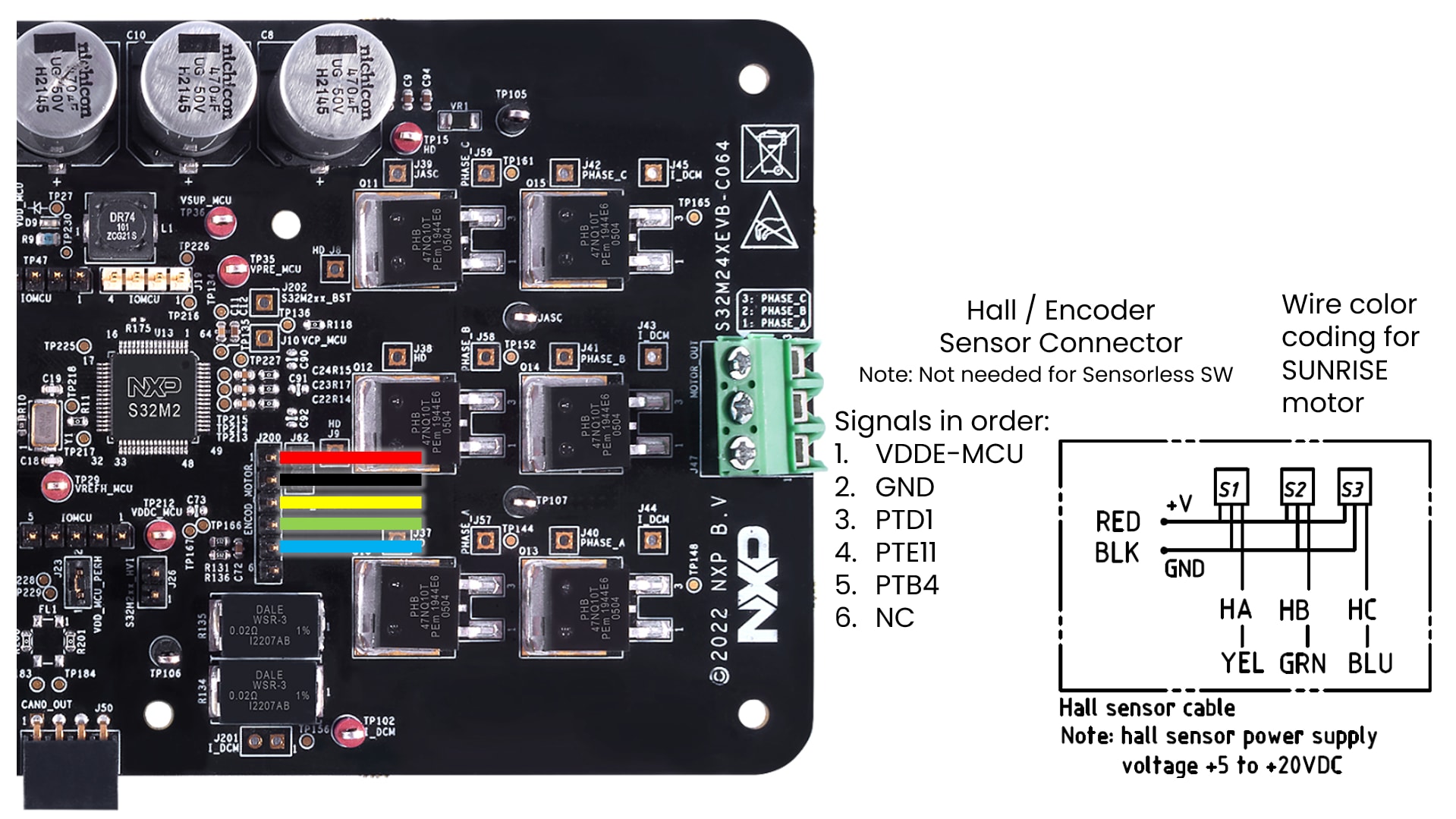
3.3 Plug In the Encoder/HALL Sensors
Optionally plug the Encoder/HALL sensors (only for sensor-based sw application).
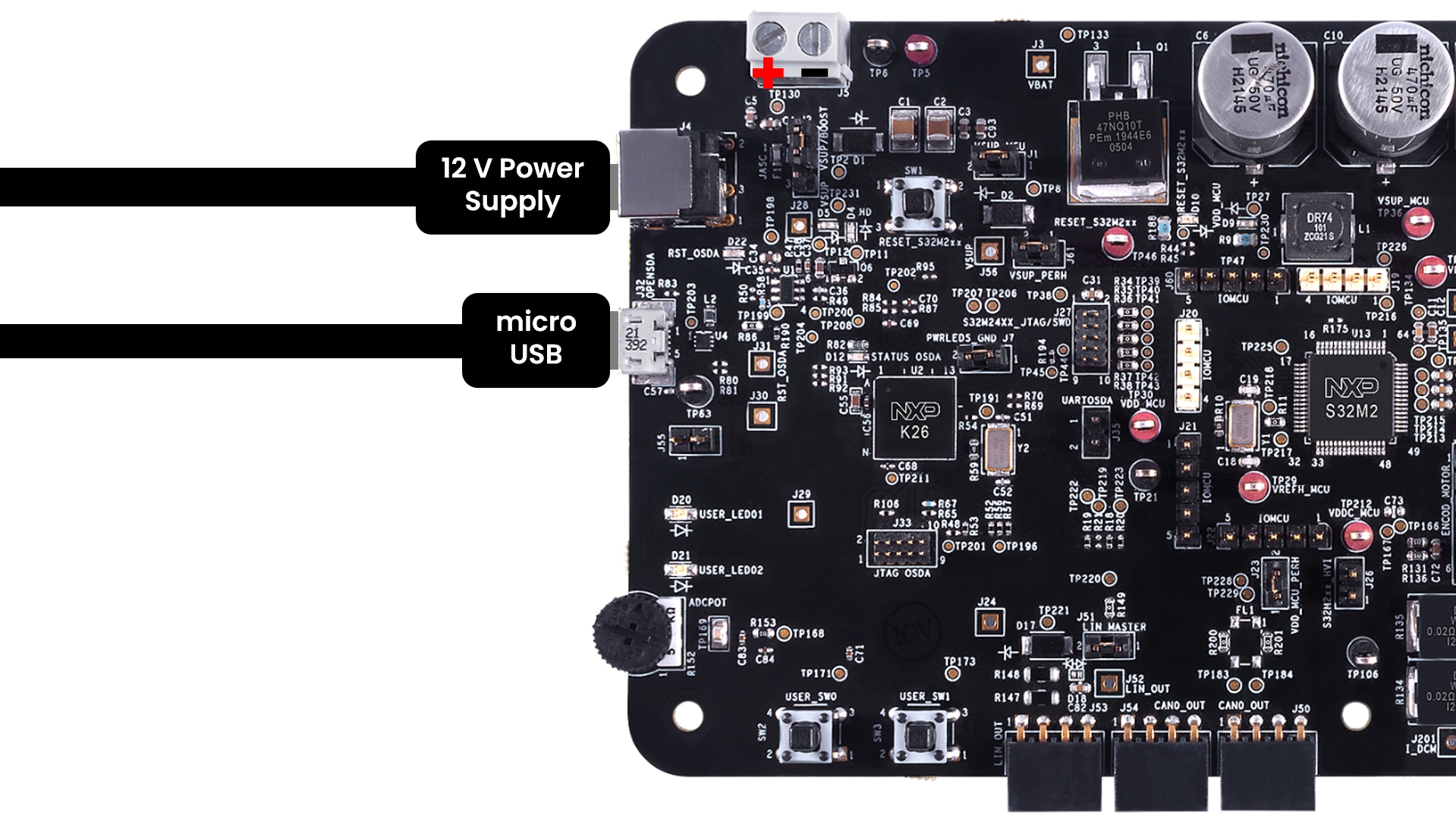
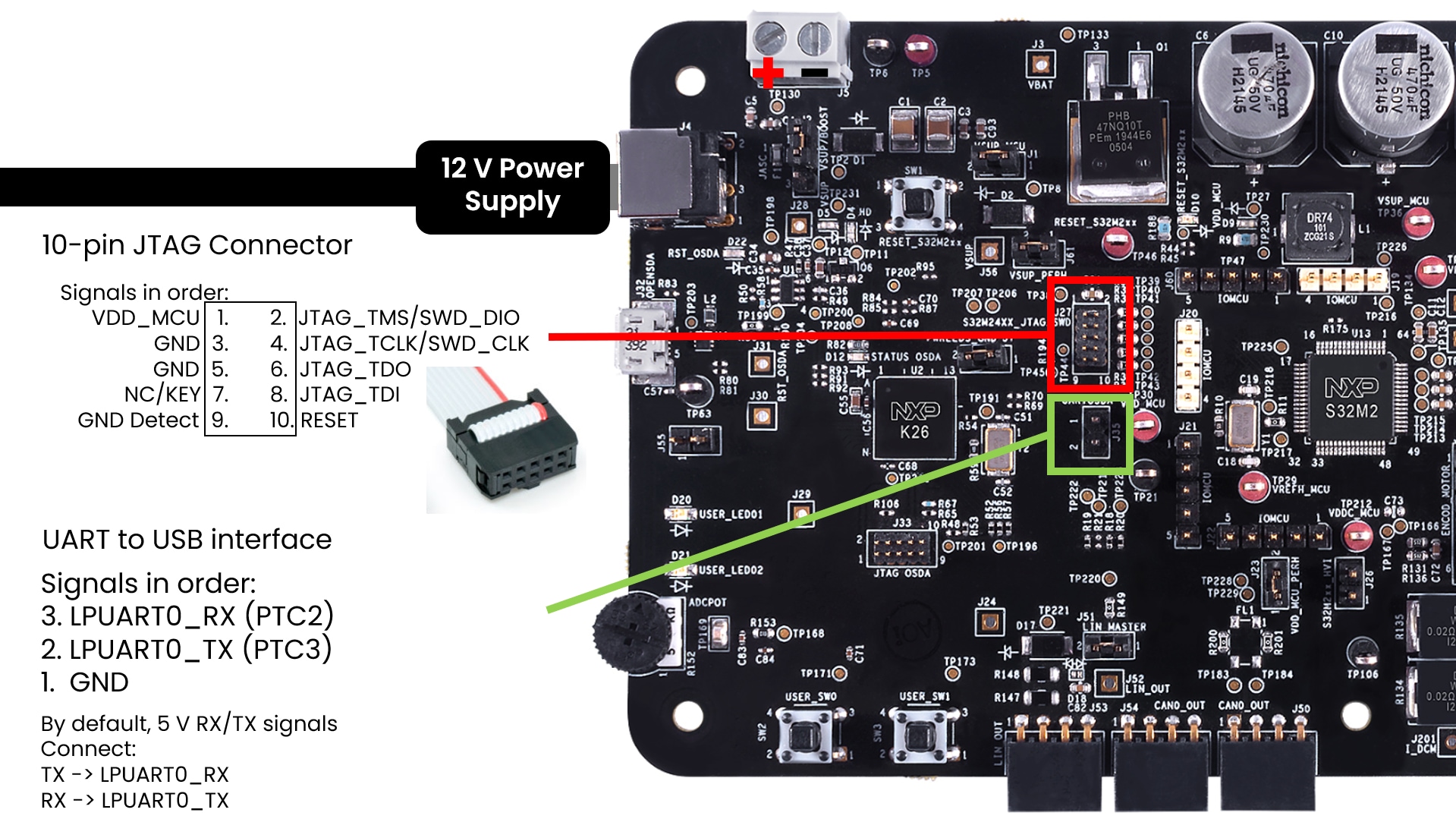
3.4 Plug In the Power Supply and USB Debug Interface
4. Build, Run
4.1 Build, Run
To accelerate your development, visit the Application Code Hub. There you can:
- Access a wide range of validated application examples
- Download ready to use software for rapid prototyping
- Work with tested code assets that follow current design guidelines and best practices
Application Control
Motor Parameters (Optional Step)
If you do not use BLDC_KIT (motor Sunrise 42BLY3A78-24110), you may need to edit the motor parameters according to used BLDC/PMSM motor. In the Motor Control Application Tuning (MCAT) Tool switch to Parameters tab and edit values on left side.
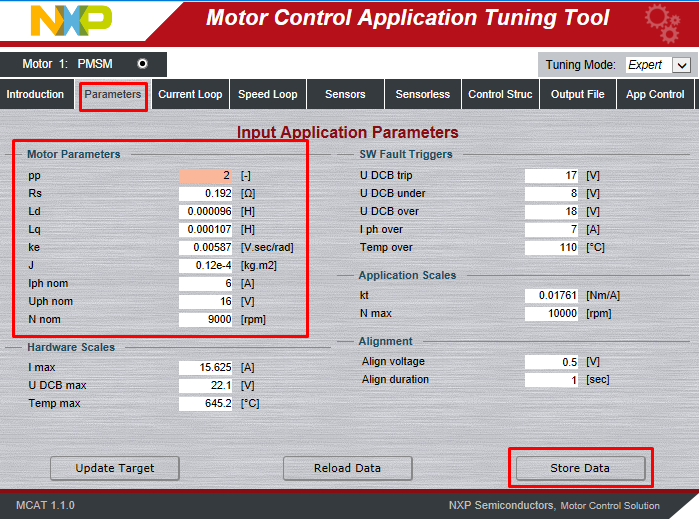
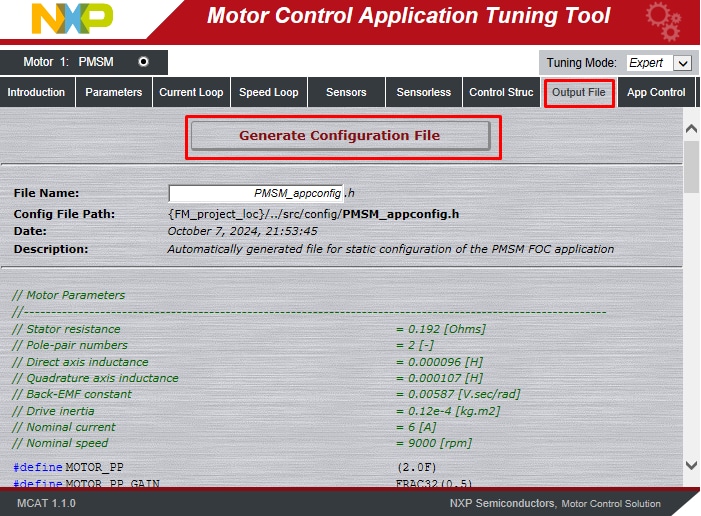
Once you finish, click on Store Data, switch to Output File tab and Generate static configuration file.
Now repeat step 4.3 to build the project and upload the code into MCU.
Spin the Motor
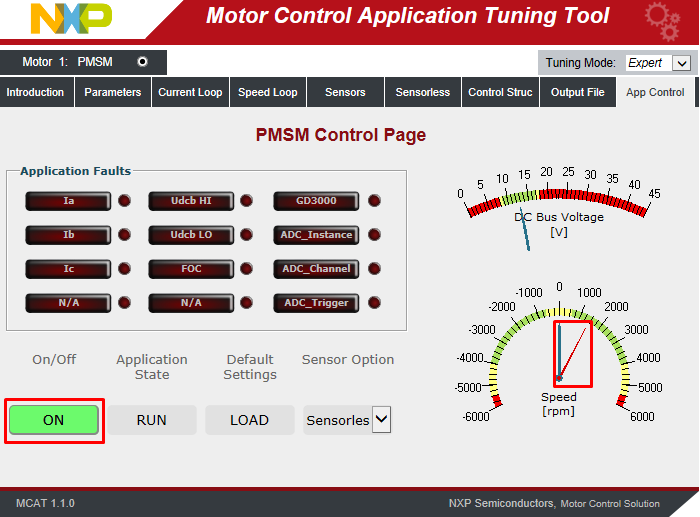
Click the App Control tab on the Motor Control Application Tuning (MCAT) Tool menu to display the application control page.
Configure the motor rpms and turn on the motor drive.
RTD Examples
Kickstart your RTD journey with these handy examples. We've rounded up some of the most common use cases to get you inspired and moving forward.
Users can copy the path directly into their window once the RTD is downloaded.
RTD Examples
AE HANDLER FAULTS
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ae_TS_T40D34M30I0R0\examples\S32DS\S32M276\Ae_Handler_Faults_Example_DS_001_S32M276AE SPI
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ae_TS_T40D34M30I0R0\examples\S32DS\S32M276\Ae_Spi_Example_DS_001_S32M276AEC SPI
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ae_TS_T40D34M30I0R0\examples\S32DS\S32M276\Aec_Ip_Spi_Example_DS_001_S32M276CAN TRCV
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\CanTrcv_43_AE_TS_T40D34M30I0R0\examples\S32DS\S32M276\CanTrcv_Example_S32M276DPGA
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Dpga_TS_T40D34M30I0R0\examples\S32DS\S32M276\Dpga_example_S32M276DPGA IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Dpga_TS_T40D34M30I0R0\examples\S32DS\S32M276\Dpga_Ip_example_S32M276GDU
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Gdu_TS_T40D34M30I0R0\examples\S32DS\S32M276\Gdu_Example_DS_S32M276LIN TRCV
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Lin_43_LPUART_FLEXIO_TS_T40D34M30I0R0\examples\S32DS\S32M276\Lin_LinTrcv_Flexio_MasterFrameTransfer_S32M276LIN TRCV LPUART
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Lin_43_LPUART_FLEXIO_TS_T40D34M30I0R0\examples\S32DS\S32M276\Lin_LinTrcv_Lpuart_MasterFrameTransfer_S32M276CLOCK IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Mcu_TS_T40D34M30I0R0\examples\S32DS\S32M276\Clock_Ip_Example_S32M276MCU
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Mcu_TS_T40D34M30I0R0\examples\S32DS\S32M276\Mcu_Example_S32M276POWER IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Mcu_TS_T40D34M30I0R0\examples\S32DS\S32M276\Power_Ip_Example_S32M276MEM OTP IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ocotp_TS_T40D34M30I0R0\examples\S32DS\S32M276\Mem_Otp_Ip_Example_S32M276OCOTP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Ocotp_TS_T40D34M30I0R0\examples\S32DS\S32M276\Ocotp_Example_S32M276PLATFORM MPU HLD
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Platform_TS_T40D34M30I0R0\examples\S32DS\S32M276\Platform_MPU_HLD_Example_S32M276MPU IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Platform_TS_T40D34M30I0R0\examples\S32DS\S32M276\Platform_MPU_IP_Example_S32M276PORT
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Port_TS_T40D34M30I0R0\examples\S32DS\S32M276\Port_Example_S32M276SIUL2 PORT IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Port_TS_T40D34M30I0R0\examples\S32DS\S32M276\Siul2_Port_Ip_Example_S32M276WDOG
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Wdg_TS_T40D34M30I0R0\examples\S32DS\S32M276\Wdg_Example_S32M276WDOG IP
C:\NXP\S32DS.3.6.1\S32DS\software\PlatformSDK_S32K3\RTD\Wdg_TS_T40D34M30I0R0\examples\S32DS\S32M276\Wdg_Ip_Example_S32M276Design Resources
Board Information
Chip Documents
Support
Forums
Connect with other engineers and get expert advice on designing with the FRDM-A-S32M276 Reference Design Board using our community sites.