Functional Safety is key to ensure that products operate safely — and
even if they fail, they are still capable of entering in a controlled safe
operation mode. Let’s say you want to make a left turn using your
electrical power steering and the control unit malfunctions. With Functional
safety and enough redundancies, the car will give you degraded assistance in
the steering to move it in a safe place.
Think about the modern car. It’s more complex than ever, with
increasing electronics and millions of lines of code running it. As our
car becomes more automated, the complexity will continue to rise.
It makes functional safety even more important to automakers. They
can’t choose to ignore it.
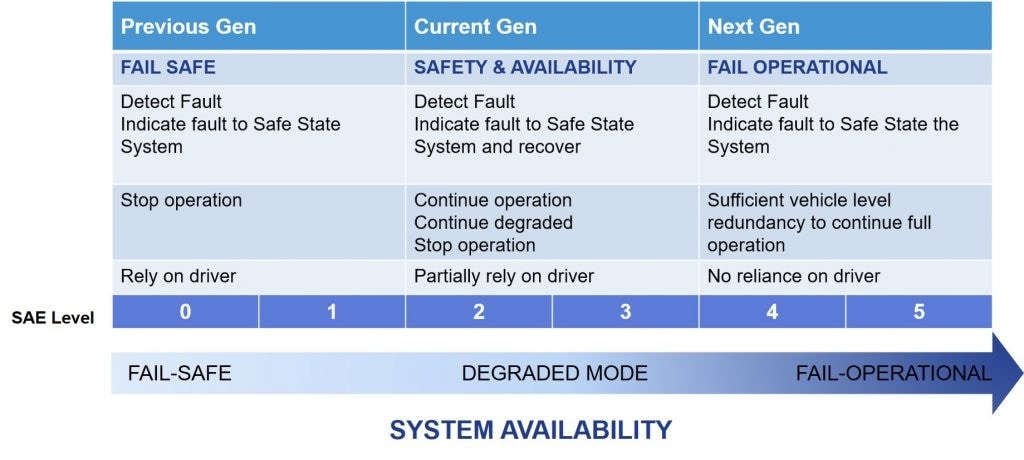
Today, vehicles operate with a traditional fail-safe engine control unit
architecture. This detects the fault, transitions the system to safe state but
at the end, the driver is still able to take back the control of the vehicle.
Gradually, as electronic systems evolve to Levels 4 and 5, the dependence on
the driver diminishes as the vehicle has sufficient redundancy and diversity
to continue full operation despite the detection of a fault.
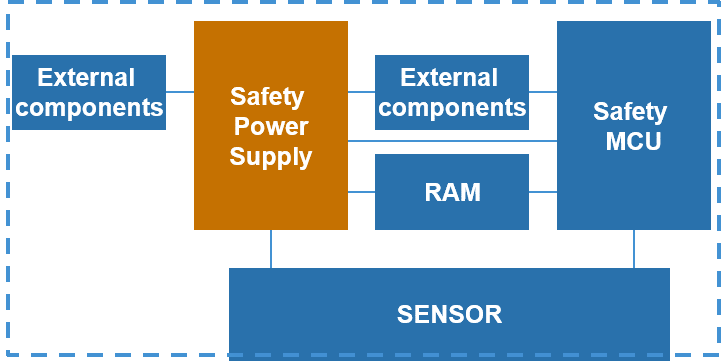
System failure prevention: from fail-safe system architectures
In a fail-safe architecture, the power supply delivers and monitors over- and
under-voltage to the microcontroller and the other peripherals. It is also in
charge of sensing and evaluating the MCU safety operation through the watchdog
and HW Error monitoring functions. If a fault is detected, the system goes
into safe state (driven by the safety power supply) which guarantees that the
function is maintained in a known and defined state (not uncontrolled).
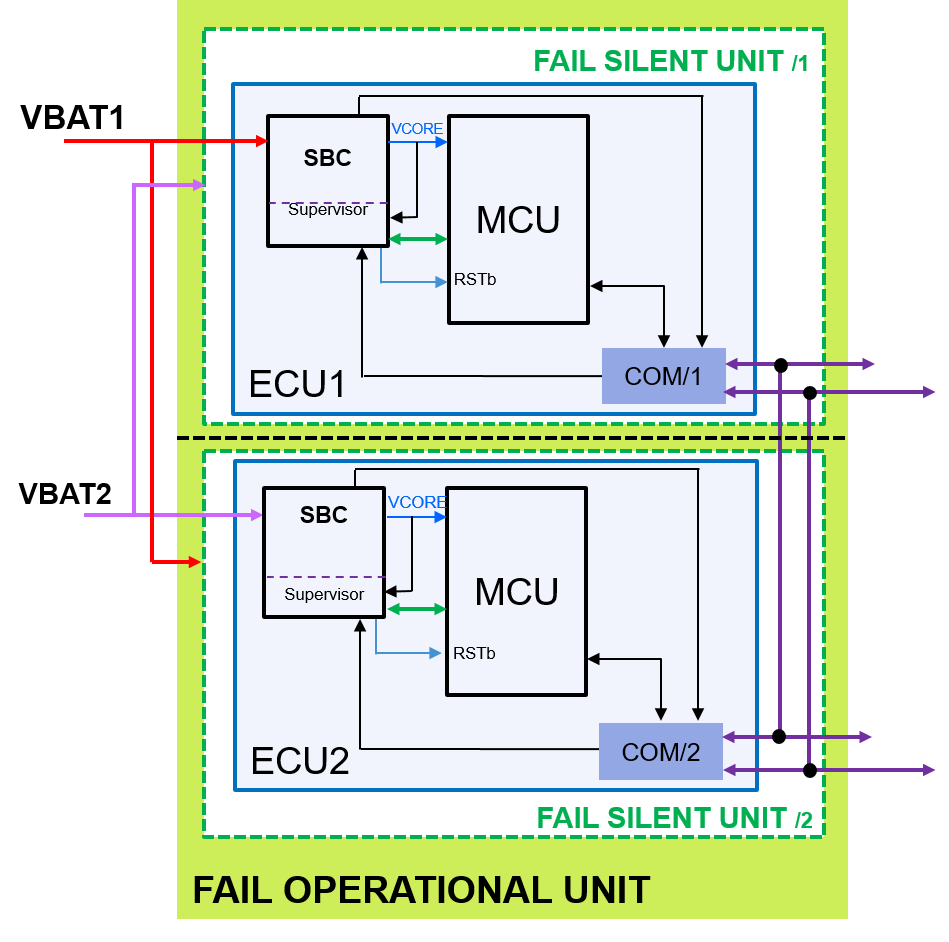
To fail-operational system architectures: How do they work?
As vehicles move beyond the first levels of automation, new fail-operational
system architectures are required to add more functionality to the vehicle.
Fail-operational systems guarantee the full or degraded operation of a
function even if a failure occurs. In this instance, the target applications
are characterized as needing high-performance, a high level of safety
integrity and a high level of availability. The fault detection and reaction
is controlled by independent hardware since a fail-operational system includes
minimum two fail-silent units. To remove common cause failures, even the
supply is ensured by redundant and independent batteries (VBAT1 and VBAT2).
 Depending on the SAE level targeted by the car maker, the backup function can
be used for several seconds, to several minutes. For Level 3 of automation,
the driver is informed by the system that there is a failure and to take back
the control of the vehicle. Starting at L4, the driver is no more informed of
a fault, so the robot (car) will most likely park the vehicle in a safe area
for the occupants of the vehicle and the other road users. As such, NXP is
capable of providing functional safety systems that are more and more advanced
and therefore more reliable and effective than ever before. Safety
architectures and system design aim to enable full redundancy to facilitate
higher levels of autonomous driving and fault tolerance in the case of
failure.
Depending on the SAE level targeted by the car maker, the backup function can
be used for several seconds, to several minutes. For Level 3 of automation,
the driver is informed by the system that there is a failure and to take back
the control of the vehicle. Starting at L4, the driver is no more informed of
a fault, so the robot (car) will most likely park the vehicle in a safe area
for the occupants of the vehicle and the other road users. As such, NXP is
capable of providing functional safety systems that are more and more advanced
and therefore more reliable and effective than ever before. Safety
architectures and system design aim to enable full redundancy to facilitate
higher levels of autonomous driving and fault tolerance in the case of
failure.