I spoke with OpenSynergy’s Automotive Director for Integration Competency Centre, Stéphane Turlier about virtualization features in the AUTOSAR Classic Platform.
Stéphane explained that there is growing interest in the topic of software separation in the real-time domain. The AUTOSAR Classic Platform operating system uses software layers for separation in time and space. System architects are now very much at ease with this and have started to manipulate the concepts of separation to create heterogeneous architectures with different levels of functional safety.
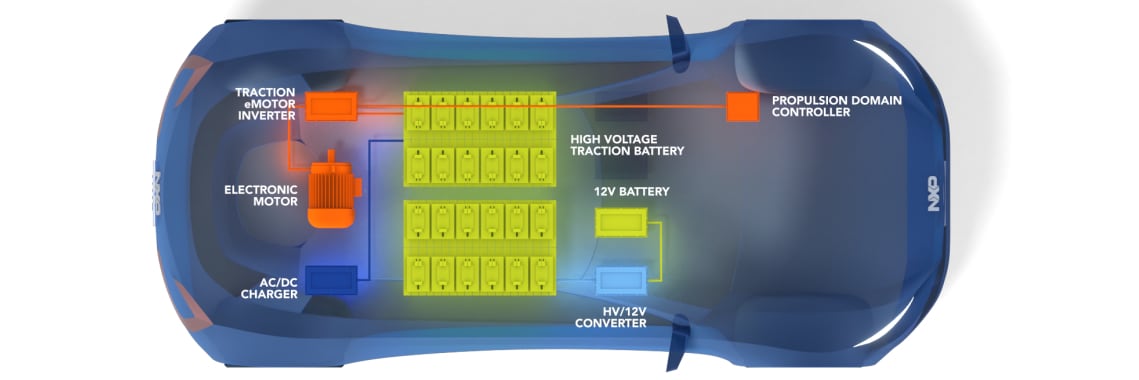
Take for example some electric motor control software. The piece of code that receives the assigned torque input and converts this torque into a control command, such as whether the wheel spins forwards or backwards, is usually a very high level of functional safety software. This software is separated from the diagnostic or communication software, both of which have lower safety requirements. With the separation concept, you can combine all this software and run it on the same hardware with freedom from interference.
Now that AUTOSAR has enabled system architects to approach this kind of problem, they can take separation to the next level and design more complex solutions safely. For example, if you want to mix the electric motor control software with the battery management calculations, then you would need another level of separation. This is where virtualization can definitely bring another dimension and complement the abilities of AUTOSAR Classic Platform.
More than this, new microcontrollers, such as the NXP S32s, make hardware-assisted virtualization performant enough to think of combining AUTOSAR Classic Platforms and virtualization.
In this interview, Stéphane explains the advantages of virtualized AUTOSAR implementations and the challenges to address to facilitate this adoption by system architects.
Watch the video interview here>>
Electrification