In
Orientation Representations: Part 1, we explored the use of rotation matrices and Euler angles. At the end of
that discussion, I alluded to the fact that there might be more efficient ways
of describing rotations. Let’s start with the rotation of a simple
rigid body (in this case a cylinder) as shown in Figure 1. Here, the cylinder
is rotated such that a point on its surface originally at “A” is
rotated to point “B” in space.
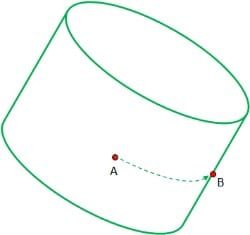
Figure 1: Rotation of a rigid body such that a reference point moves from
“A” to “B”
For this simple case, I’ve kept the axis of rotation along the vertical
axis of the cylinder as shown in Figure 2. But that is not a requirement for
the underlying mathematics to work. So long as we have a rigid body, we can
always describe the rotation in the manner that follows.
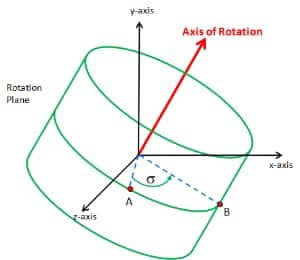
Figure 2: Overlay of Cartesian Coordinates onto System of Figure 1
Figure 3 deals with the same rotation, but focuses on the fact that we have a
rotation plane that is perpendicular with the axis of rotation. The movement
of the cylinder is a rotation equal of angle α, about the axis of
rotation, where the point of interest is constrained to lie within the
rotation plane.
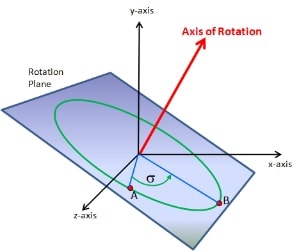
Figure 3: Looking at Just the Rotation Plane and Axis of Rotation
The rotation is fully described by the three components of the normalized
rotation axis and the rotation angle α, which may be in radians or
degrees, depending upon the system in use. As an example, I recently did some
OpenGL ES graphics programming. This system is very popular on portable
devices. I’m using it to program demos for Android, for later porting
to iOS. In OpenGL ES, you build up 3 dimensional objects as a collection of
triangles, which can then be offset and/or rotated to change perspective. As
an example, our cylinder might be crudely drawn as shown in Figure 4.
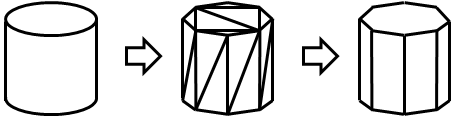
Figure 4: OpenGL ES Drawing of a Cylinder
In this case, I’ve modeled the top and bottom of the cylinder with 6
triangles each, and the other side is modeled using a total of 16 triangles
arranged in a strip. OpenGL ES is optimized to draw such structures
efficiently, and it is possible to then “render” textures onto
the drawn surfaces. What’s really neat is that once drawn, we get a
reasonable approximation of the cylinder of Figure 1 simply by doing a -30
degrees rotation about the Z axis (presumed to be out of the page) using a
single OpenGL ES instruction:
gl.glRotatef(-30.0f, 0.0f, 0.0f, 1.0f);
At this point, you’re probably thinking: “Yeah, that makes
sense, but how does it work at the math level?” This is the where I
need to introduce the concept of a quaternion. Conceptually,
a quaternion encodes the same axis and angle as above. But for mathematical
reasons it deals with 1/2 of the rotation angle as shown below.
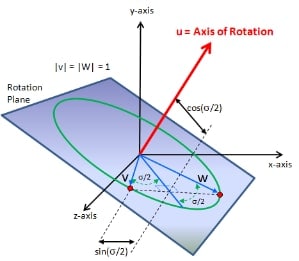
Figure 5: System of Figure 4 in Terms of Quaternion Components
Before overwhelming you with the underlying math, you should know that unless
you are planning to implement your own quaternion utility library, you only
need to know a few key points:
-
It takes four numbers to fully describe a quaternion (commonly q0 through
q3).
-
Not all quaternions are rotation quaternions. Rotation quaternions have unit
length (q02 + q12 + q22 + q32 =
1). The discussion below will be restricted to rotation quaternions.
-
These same rotations can be described using Euler angles, rotation matrices,
etc. as discussed in the previous posting. It is possible (and common) to
translate between formats and use multiple formats. Rotation matrices have
the advantage of always being unique. Euler angles are subject to gimbal
lock, and should not be used for internal calculations (only input/output of
results).
-
You can rotate a vector V using a quaternion q using the
equation: W = qVq* (quaternion products
and complex conjugates are defined later)
-
A sequence of rotations represented by quaternions q1 followed by q2 can be
collapsed into a single rotation simply by computing the quaternion product
q=q2q1 and then appling the rotation operator as above.
I will be presenting the mathematical definition first, and without proof. If
you really, REALLY want to know the underlying theory, let me suggest that you
pick up a copy of Jack Kuiper’s excellent text: Quaternions and
Rotation Sequences. This appears to be (by far) the most extensive treatment
on the topic, even while remaining very readable.
Notice that rotation quaternions deal with α/2, not
α. We can define a rotation quaternion “q” in one of
several equivalent fashions.
| q = (q0, q1, q2, q3) |
(Eqn.1) |
|
q = q0 + q, where q =
iq1 + jq2 + kq3
|
(Eqn. 2) |
|
q = cos(α/2) + u sin(α/2), where
u is the vector axis of rotation
|
(Eqn. 3) |
I use the quaternion form where q0 = cos(α/2). Some texts will reorder
the quaternion components so that the vector portion q is
contained in q0-2 and q3 = cos(α/2). Be sure you understand which form
your text/software library supports.
Quaternions are a form of hyper-complex number where instead of a single real
and single imaginary component, we have one real and THREE imaginary
components (i, j and k). Rules for these imaginary components are:
|
i2 = j2 = k2 = ijk = -1
|
(Eqn. 4) |
| ij = k = -ji |
(Eqn. 5) |
| jk = i = -kj |
(Eqn. 6) |
| ki = j = -ik |
(Eqn. 7) |
Two quaternions, p and q, are equal to one another only if the individual
components are equal. You add two quaternions by adding the individual
components. If
|
p = p0 + ip1 + jp2 + kp3; and
|
(Eqn. 8) |
| q = q0 + iq1 + jq2 + kq3 |
(Eqn. 9) |
Then
|
p + q = (p0 + q0) + i(p1+q1) + j(p2+q2) + k(p3+q3)
|
(Eqn. 10) |
The addition operation commutes. That is p+q = q+p. Multiplication of a
quaternion by a scalar real number is trivial, just multiply each of the four
components by the scalar. Multiplication of two quaternions is NOT so trivial:
|
pq = p0q0 – p.q + p0q
+ q0p + p x q
|
(Eqn. 11) |
Multiplying one quaternion by another quaternion results in a third
quaternion. Notice that the 1st two components (p0q0 –
p.q) makes up the scalar portion of the
result, and the last three (p0q + q0p +
p x q) comprise the vector portion. The
quaternion product operation is not commutative pq≠qp. Order matters.
Multiplication of two quaternions includes scalar, cross product and dot
product terms. Unless you are writing your own quaternion library, you are
likely never to use the expression above. Instead, you will use a function
that does the quaternion multiplication for you.
The complex conjugate of
|
q = q0 + iq1 + jq2 + kq3 is q* = q0 – iq1 – jq2 –
kq3
|
(Eqn. 12) |
Related to this, we have
| (pq)* = q*p* |
(Eqn. 13) |
| q+q* = 2q0 |
(Eqn. 14) |
|
q-1 = q* for any unit quaternion
|
(Eqn. 15) |
Eqn. 15 is interesting. If you think of a quaternion as a rotation operator,
it says you can reverse the sense of rotation by inverting the axis of
rotation. Given our usual standard of using the Right Hand Rule to describe
the polarity of rotations, this makes perfect sense. Reversing the direction
of the axis is equivalent to reversing the direction of rotation.
Another interesting take on the above is that rotation quaternions are not
unique:
Any rotation quaternion can be multiplied by -1 and still result in the same
rotation! That’s because we reversed both the angle AND the axis of
rotation (which then cancel each other). It is conventional therefore to
remove the ambiguity by negating a rotation quaternion if its scalar component
is negative.
At this point, you are surely wondering why in the world you might, or might
not, choose to use quaternions instead of rotation matrices. Here’s a
brief summary of the pros and cons:
Topic
|
Quaternion
|
Rotation Matrix
|
| Storage |
Requires 16 bytes of storage in single precision
floating point (4 elements at 4 bytes each)
|
Requires 36 bytes of storage (9 elements at 4 bytes
each)
|
|
Computation (for 2 sequential rotations)
|
4 elements each requiring 4 multiplies and 3 additions =
28 operations
|
9 elements, each requiring 3 multiplies and 2 additions =
45 operations
|
| Vector rotation |
Rotating a vector by pre- and post-multiplication of quaternion requires
52 operations
|
Rotating a vector via rotation matrix requires
15 operations (3 elements each requiring 3 multiplies
and 2 additions)
|
| Discontinuities |
Generally, we force the scalar part of the quaternion to be positive,
which can cause a discontinuity in the rotation axis (it flips).
|
None |
|
Ease of Understanding
|
Generally takes a lot of study to understand the details
|
Easily understood by most engineers
|
| Conversion |
From rotation matrix =
| m11 |
m12 |
m13 |
| m21 |
m22 |
m23 |
| m31 |
m32 |
m33 |
we have:
q0 = 0.5 sqrt(m11 + m22 + m33 + 1)
q1 = (m32 – m23) / (4q0)
q2 = (m13 – m31) / (4q0)
q3 = (m21 – m12) /
(4q0) (Eqn.
17)
|
RM =
|
2q02 – 1 + 2q12
|
2q1q2 – 2q0q3
|
2q1q3 +2q0q2 |
|
2q1q2 + 2q0q3
|
2q02 – 1 + 2q22
|
2q2q3 – 2q0q1
|
|
2q1q3 – 2q0q2
|
2q2q3 + 2q0q1
|
2q02 -1 + 2q32
|
(Eqn. 18)
|
Equations 17 and 18 are consistent with regards to direction of rotation. If
instead of rotating a vector in a fixed frame of reference, you rotate the
frame of reference iteself, you will need to use the transpose of Eqn. 18 and
invert q1, q2 and q3 in Eqn. 17.
Returning to the quaternion rotation operator
W = qVq* , note that
V needs to be expressed as a quaternion of the form [0, vx,
vy, vz] and the multiplications are quaternion multiplies as defined in Eqn.
11. q* is the complex conjugate defined in Eqn. 12.
If you do a lot of graphics or sensor fusion work, you will probably find
yourself constantly switching between the various representations we’ve
considered. You’ll find it useful to remember a couple of identities
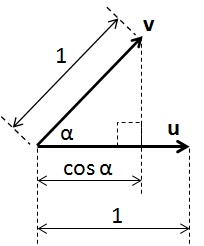
from your high school geometry course:
| The Dot Product |
u. v = | u | |
v | cos α (Eqn. 19)
|
If both u and v are unit vectors, then:
u. v = cos α (Eqn. 20)
 The Cross Product
The Cross Product
u x v = | u | |
v
| sin α n
(Eqn. 21)
where n is a unit vector perpendicular to the plane containing
u and v (the polarity of
n follows the right hand rule).
If both u and v are unit vectors, then:
n = u x v / (sin α)
(Eqn. 22)
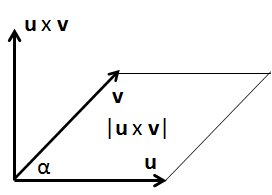
If you’ve been paying attention, you will see that α is the
rotation of u into v about the axis of
rotation defined by u x v. See! It’s
simple! Axis and angle!
References:
-
Quaternions and Rotation Sequences, Jack B. Kuipers, Princeton University
Press, 1999
-
Euler Angles
from the
Wolfram Demonstrations Project
by Frederick W. Strauch
-
Diversified Redundancy in the Measurement of Euler Angles Using
Accelerometers and Magnetometers, Chirag Jagadish and Bor-Chin Chang,
Proceedings of the 46th IEEE Conference on Decision and Control,
Dec. 2007
-
“Euler Angles” at Wikipedia
-
Orientation Representations: Part 1, Michael Stanley at the Embedded Beat, October 2012