Over the past year, a series of IoT-themed senior design projects by
students at Texas State University were created based on
Kinetis microcontrollers
and
Thread wireless networking technology. One of the projects was a remote weather
station that measures temperature, barometric pressure, wind speed,
wind direction and rainfall and transmits the data over a Thread network.
This is a great IoT application example that uses multiple sensors
– each with very different functional, timing and signal
characteristics – and can be easily implemented using a single
Kinetis microcontroller that has wireless connectivity.

Thread-connected remote weather station built by Texas State University
students
Key components of the weather station
The weather
station is designed around a
TWR-KW24D512
Kinetis Tower System module, which provides the necessary microcontroller
functionality for the sensors and wireless connectivity for the Thread
networking protocol. The anemometer (wind speed), weather vane (wind
direction) and rain gauge sensor functions are implemented using a SparkFun
SEN 08942 Weather Meter kit. A TWRPI-MPL115A2 barometer attached to the
TWR-KW24 board is used to measure atmospheric pressure. A Texas Instruments
TMP36 analog temperature sensor is used to measure ambient temperature. A
TWR-PROTO
board together with a
TWR-ELEV
system provides space for additional circuitry and robust connections to the
external sensors.
The electronic components (excluding most of the sensors) are contained in a
weatherproof enclosure mounted to the base of the weather station mast. The
entire station is powered from a USB adapter plugged into a 110V AC outlet in
the enclosure. The sensors are all connected via modular RJ11 jacks.

TWR-KW24D512 Tower System and wiring in the weatherproof enclosure
TWR-KW24 Configuration
Together with the integrated low power 2.4 GHz IEEE 802.15.4-2011 radio
frequency transceiver, the
MKW24D512
device includes:
- 50 MHz Arm Cortex-M4 Core (1.25 MIPS/MHz)
- 512 kB of flash and 64 kB of RAM
- Power management controller with 10 different power modes
-
Security features including, secure flash, tamper detect, cryptography
acceleration unit and 128-bit random number generator
-
16-bit SAR ADC with one differential and up to 11 single-ended external
analog inputs
-
Various timer modules including FlexTimer, Periodic Interrupt Timer,
Programmable Delay Block and Independent Real –Time clock
- USB, SPI, UART and I2C interfaces
- Up to 28 GPIO channels
The sensors used for the weather station project use two ADC channels for the
wind vane and temperature sensor, two GPIO channels for the wind speed and
rain gauge and an I2C channel via the TWRPI connector for the barometric
pressure sensor.
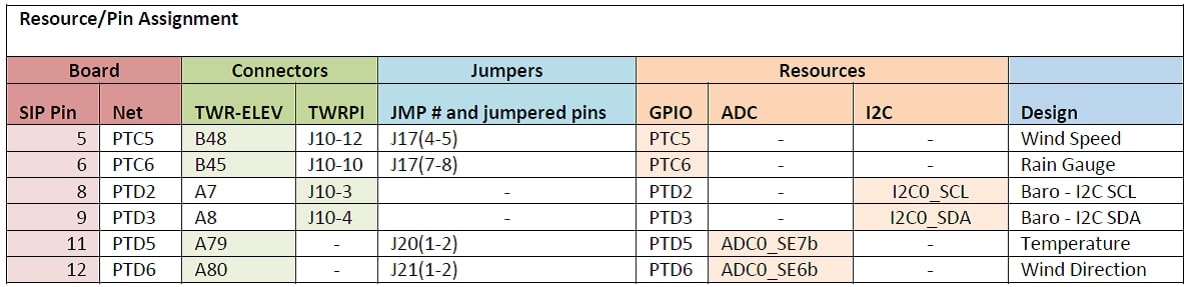
TWR-KW24 resource assignment, board connection and jumper configurations
Sensor algorithms
The sensors each have very different
functional, timing and signal characteristics, so one of the challenges of
this project was developing appropriate interfaces and algorithms for each of
the sensors and getting them to all work together. The resulting
implementation is based on a main sampling loop triggered by a 10ms periodic
interrupt timer, with a callback function that executes the measurement
algorithm for each sensor. The operation and measurement algorithm for each
sensor is briefly described as follows:
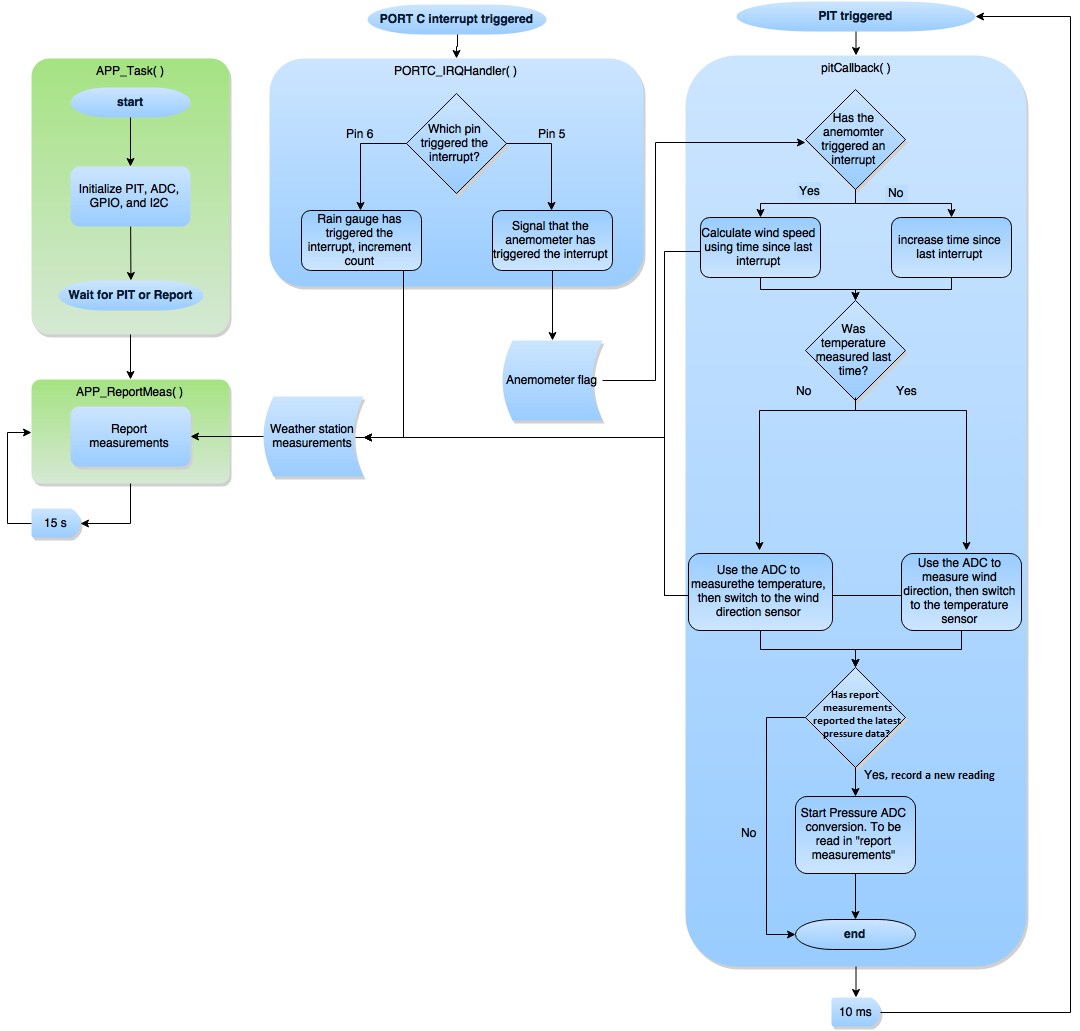
Weather station software design
Wind vane
The wind vane sensor is a voltage divider
consisting of a resistor array connected with eight magnetic reed switches. A
magnet on the wind vane closes either one or two adjacent switches depending
on the wind direction. This produces one of 16 different voltage levels
corresponding to 16 discrete compass directions. The voltage is measured on
one of the ADC channels and a lookup table is used to translate each voltage
range to a corresponding wind direction. However, because the voltage levels
do not change monotonically with wind direction we implemented a debounce
algorithm to ensure that voltage transitions are not interpreted as an
incorrect direction.
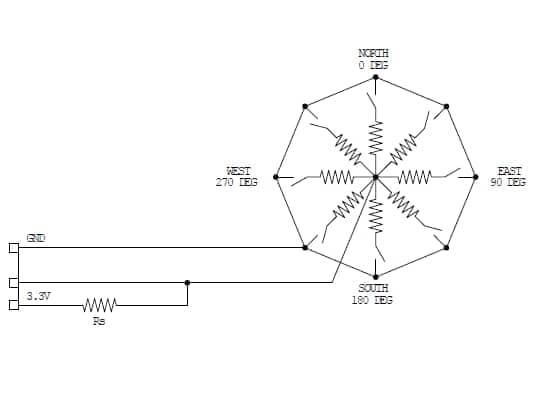
Wind vane voltage divider circuit
Anemometer
The wind speed measurement uses a cup-type
anemometer with a magnetic reed switch that generates a pulse with each half
rotation. One pulse per second corresponds to a wind speed of 1.492 miles per
hour. In order to provide sufficient accuracy over a wide range of wind
speeds, the measurement algorithm measures the interval between pulses. A GPIO
input channel is configured to trigger an interrupt on the rising edge of each
pulse. The interrupt sets a flag that is checked every 10ms by the main
measurement loop, and a software counter records the number of 10ms intervals
since the previous pulse. If the flag has been set, the wind speed is
calculated from the counter value and the counter is reset; if not the counter
is simply incremented. This solution provides an error of <10% for wind
speeds up to 15 miles per hour and a maximum measurement of 149.2 miles per
hour. A 30 second timeout defaults the measured wind speed to zero for wind
speeds less than 0.05 miles per hour.
Rain gauge
The rain gauge measures rainfall using a self-emptying bucket with a magnetic
reed switch that generates a pulse each time the bucket tips. Each tip of the
bucket indicates 0.011 inches of rainfall. Similar to the anemometer, a GPIO
input channel is configured to trigger an interrupt on the rising edge of each
pulse. A software counter records the number of accumulated pulses and thus
the total rainfall. A debounce function eliminates spurious counts from the
reed switch.
Temperature
The TMP36 analog temperature sensor was selected to measure ambient air
temperature. The sensor is protected from the elements and direct sunlight in
a simple housing made from PVC plumbing parts. The temperature sensor is
powered by 3.3V DC from the TWR-KW24D512 board and produces an analog output
voltage that is linear with temperature. The output voltage is measured on one
of the KW24 ADC channels and translated to temperature using specified
calibration values.
During initial testing we noticed some crosstalk between the temperature
sensor and wind direction sensors, which are both measured using multiplexed
channels on the same ADC. This problem was solved by alternating these
measurements between successive 10ms sampling intervals to allow sufficient
settling time on the ADC input. In addition, we filtered the measured
temperature using a 50 sample moving average to reduce noise.
Barometer
The
MPL115A2 absolute digital pressure sensor uses a MEMs pressure sensor and an
onboard processor to convert the atmospheric pressure measurement to a 16-bit
digital value that is communicated over an I2C interface. The TWRPI-MPL115A2
module is attached to the TWRPI connector on the TWR-KW24D512 board, which is
configured to use the I2C interface on the KW24. The MPL115A2 is sampled
every 10ms by the main measurement loop, and the measured value is filtered
using a 30 sample moving average. An initial setup routine performs
calibration of the barometer.
Thread Communication
Communicating the sensor data over
the IEEE 802.15.4 network using Thread was actually one of the easiest parts
of this project. The Thread stack implements all the required wireless
networking functionality including link configuration and provisioning,
network topology management and security features. All that was needed was to
assemble the measurements into a JSON (JavaScript Object Notation) string,
which is passed to the Thread stack in a single function call.
The weather station is configured as a Thread Router, which means that it can
act as a repeater node in the mesh network as well as a source of sensor data.
For this demo we used a USB-KW24D512 configured as the Thread Border Router.
The USB-KW24D512 communicates with a Utilite IOT Gateway running Proximetry
AirSync agent to send the measurement data to the Proximetry cloud service.
The weather station is configured to transmit data once every 15 seconds,
although this can easily be changed. The data appears in near-real time on the
Proximetry portal, which also provides network status and topology
information.
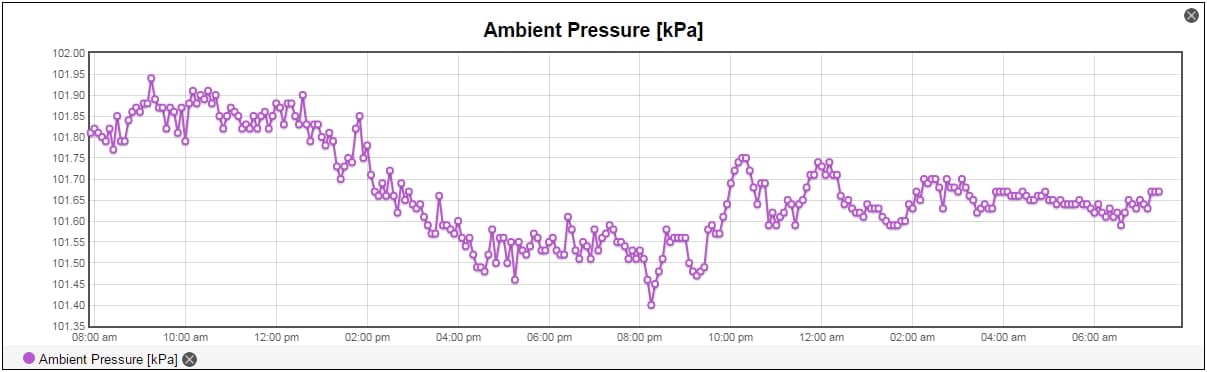
Ambient pressure: Weather station data on the Proximetry portal
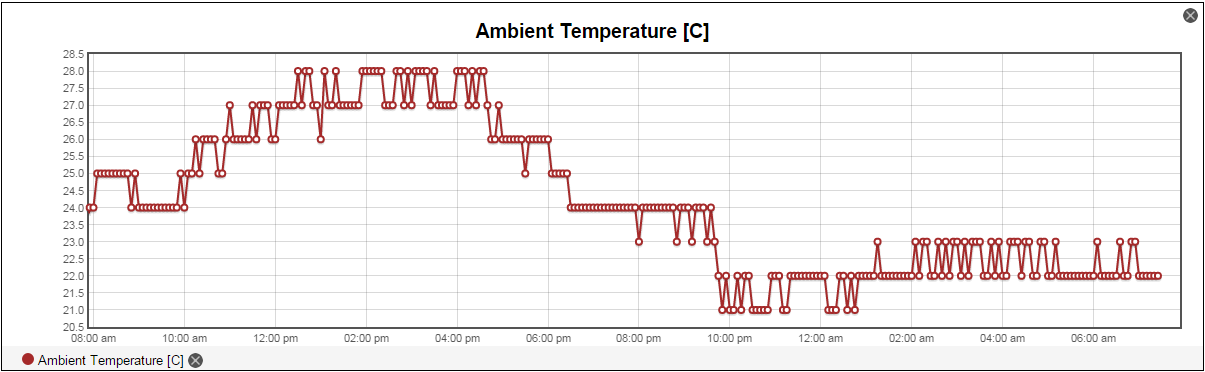
Ambient temperature: Weather station data on the Proximetry portal
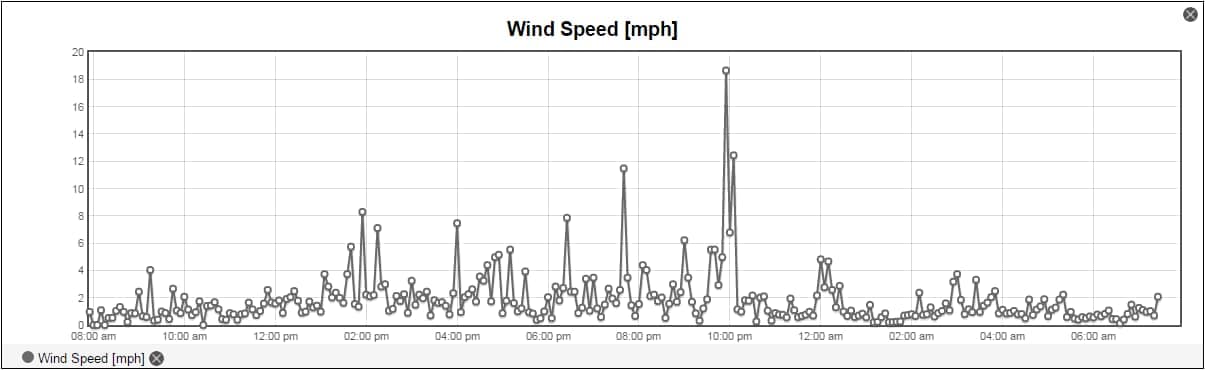
Wind speed: Weather station data on the Proximetry portal
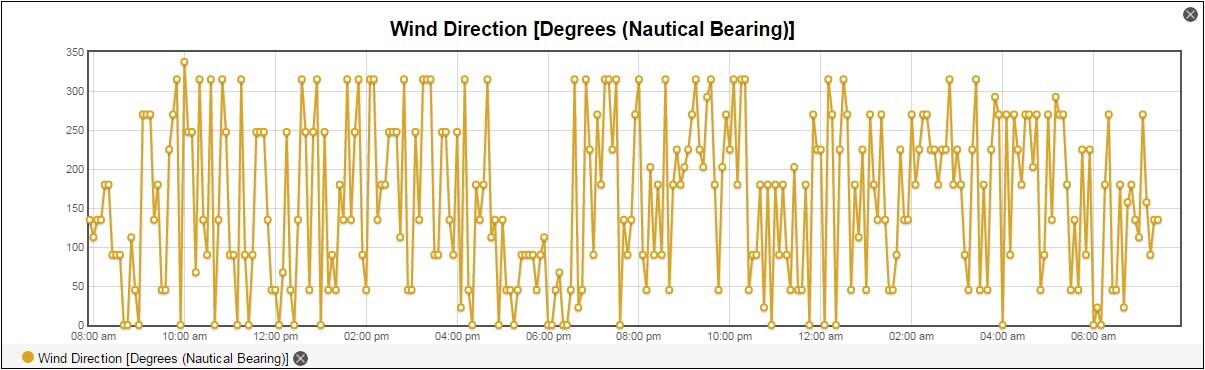
Wind direction: Weather station data on the Proximetry portal
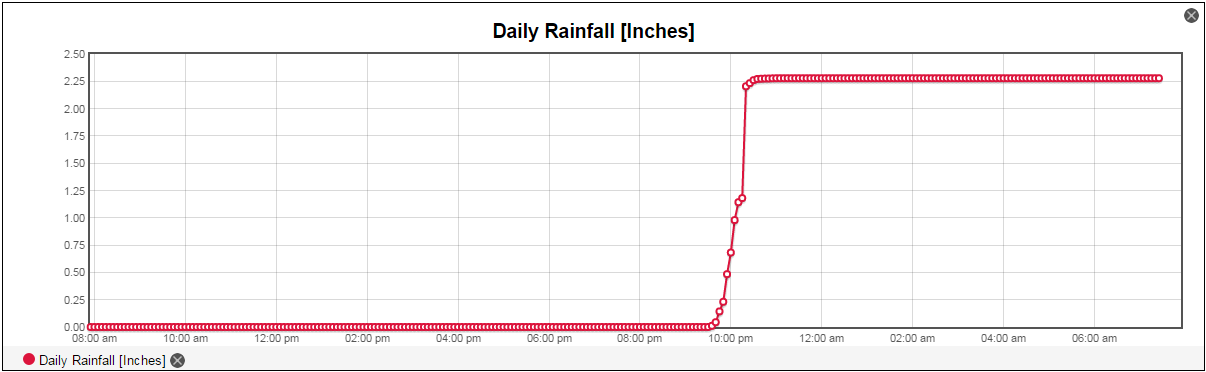
Daily rainfall: Weather station data on the Proximetry portal
The students completed the weather station design, and we have since built
additional demo installations that are being used in customer demos
around the world. In the end, this turned out to be a highly rewarding project
and the students learned a lot – not only about
our microcontroller and Thread networking technologies but also about the
process of specifying, designing, building, coding, testing and documenting. I
can’t wait to see the great new IoT “Thing” they come up
with next!