For more than a year now, the coronavirus has changed our daily lives. In
HoverGames Challenge 2, “Help Drones, Help Others During Pandemics”, we asked
contestants to come up with innovative ways for drones to help people in need,
improve crisis management or even directly prevent the spread of disease. We
are thrilled to tell you that our talented contestants have put their
creativity to the test and have emerged with compelling solutions for drones
to help, from maintaining quarantine zones and protecting crops, to helping
people mentally cope with the perils of isolation.
Whether it’s flying entertainers, vaccine delivery or drones that give farmers
the tools to protect crops against wild animals, we are excited to see the
qualified and innovative ideas in
HoverGames
Challenge 2. These ideas show that even during a crisis, human spirit
prevails, and that compassion, solidarity, perseverance and problem-solving
skills of engineering scientists can lead to innovative and life-saving
solutions.
Check out the highlights of HoverGames 2 in this video!
In HoverGames Challenge 2 (HG2) participants were asked to build and test
their idea using the complete NXP
robotic drone kit
and incorporate the experimental “NavQ” vision system and mission computer
based on
NXP i.MX 8M Mini. It was asked that they share the code so that their ideas can also inspire
and literally "help others".
The Winning Entries
Food shortages have been a real threat during the pandemic. Many of us
remember empty shelves of pasta, flour, yeast and even powdered sugar. Due to
closed borders, harvest workers were initially unable to enter many countries.
Farmers were missing the workforce to harvest and manage their crops.
In addition to wild animals potentially spreading disease to crops, it was
suspected that the coronavirus itself was transmitted to humans through the
consumption of wild animals. Our first-place winner, Team SCAREcrow, looked at
how drones can be used to autonomously protect crops and livestock from
wildlife, and prevent wild animals from transmitting infection or disease to
crops and livestock.
SCAREcrow consists of modular and scalable software parts: agents, controllers
and base station. In this scenario, the agent is the drone with the FMUK66 PX4
flight controller and the NavQ mission computer. The controller is a
ground-based artificial intelligence (AI) process that is analyzing and
working with the image data being provided by the agent.
Meanwhile the base station software runs coordination between the controllers
and the agents and ensures the agent and controller are subscribed to each
other for this short-term activity. When not in use, agents (drones) and
controllers (AI) return to a subscription pool.
More simply put, when wildlife is detected in the field, one or more drones
are deployed to stream back their video and location information (the drone
can also offload some of the Neural net processing). The base station
connects them with a controller software AI process that then manages them
while they “herd” animals away by triggering the drone(s) to disperse
wildlife. Once the animal is no longer a threat, the drone returns home and
waits for its next job.
This system, that sits passively in a farmer's field, watches for animal
intruders, and sends the NXP drone to scare away potential threats, can be
easily scaled for coordinated control of multiple drones by multiple agents to
more effectively cover larger keep out zones.
This idea applies neural networks with reinforcement learning and shows a new,
innovative use case for drones in agriculture. Currently, most of the drone
use for farmers is either related to fertilization of crops, or to
specifically monitor crop health. Using drone technology to watch fields for
destructive pests opens another new application area. Additionally, this
project was clearly written, documented, and the ideas presented in a clear
manner. The story is well told and enhanced through a series of YouTube Videos
as well as a Wiki website that walks you through the steps needed to recreate
this project.
Congratulations, Team SCAREcrow! You Are the Winner of the HoverGames
Challenge 2!
Our second-place winner for HG2 is no stranger to HoverGames and was the
winner of the HoverGames 1 challenge
“Fight Fires with Flyers”. Dobrea highlights that although there are now different vaccines on the
market that protect from an infection with Covid-19, it will still take some
time before the entire population has been vaccinated. Until then, social
distancing, washing hands, wearing masks and keeping rooms ventilated is still
considered the most important preventive measure to protect yourself and your
loved ones from an infection.
Dobrea’s idea focuses on an autonomous drone to sustain and support quarantine
zones. As a starting point, Dobrea built a development system based on the
HoverGames drone, the robotic drone
Flight Management Unit, and Linux companion computer. By using the NXP FMUK66 running PX4
autopilot, the drone will carry out a pre-programmed autonomous flight around
the quarantine zone and return to the landing point. If movement is detected
via the intelligent system, the drone will send an update to the base station.
The system can also support diverse types of applications such as
transportation of goods.
The highlight of Dobrea’s entry is the detail and quality of each
step-by-step instruction, accompanied by a very thorough documentation.
There were several carefully controlled experiments resulting in
improvements to the telemetry system range and GPS noise floor, as well as
performance analysis of neural networks running on various processors.
Dobrea explains details of using OpenCV and even updating the NavQ software
distribution Linux image.
Dobrea shows how to take advantage of the impressive PX4 software ecosystem
including communication between FMUK66 and NavQ and Groundstation based on
MAVSDK C++ library and the mavsdk_server, and then later by way of custom uORB
messages and MAVLink with custom Python code running on a Linux host.
The level of detail included in the submission is impressive, as is the extent
of how he “helps others” with his instruction.
During the pandemic, social isolation and resulting existential anxiety seems
to be leading to many people suffering from mental exhaustion and anxiety. The
added fear of an infection can also prevent many people from going outside for
physical activities. This is especially true for those living in cities and
crowded places.
Fabio’s drone makes outdoor activities safer by seeing where people are
walking and uploading the data to a map application, highlighting how
frequented an area is. This allows people to make an informed decision and
identify safer and less crowded places to go for a walk.
The drone uses object detection and tracking algorithms using OpenCV to
observe walkers and upload the aggregated path travelled to a mapping
application. The map shows a 3D 4-meter bubble of the walker that can help
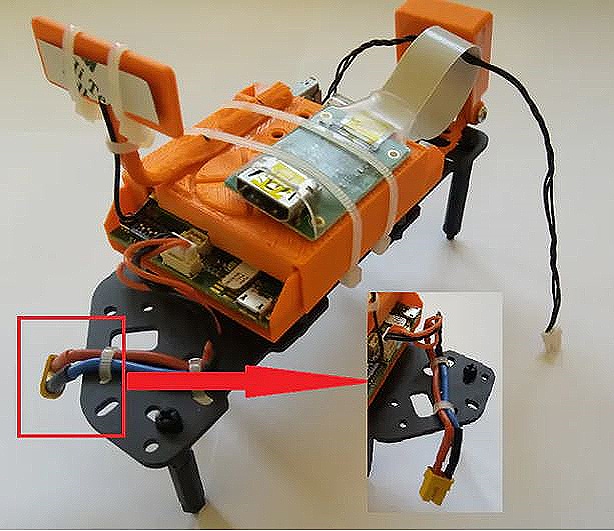
others make precise movements when they decide to go out. Since the camera
Fabio used turned out to be too heavy for the drone, he 3D printed a base
mechanism which can support dampers and handles both NavQ Board and Coral
Camera to save space for the fly controller at the center of the drone.
Fabio’s idea was another excellent example of documenting a project well. The
included images, source code and instructions for creating and using custom
messages also shows the versatility of this software and hardware ecosystem.
Carefully constructed vision-based applications of drones can supply useful
research data and inform the public while supporting and addressing privacy
concerns.
Bright minds. Bright futures. NXP team members create breakthrough technologies that advance our world.
The future starts here.
Conclusion
We are thrilled about the high number of quality submissions: it was
incredibly challenging to judge the top 3 and a tight race within all top
ranked entries. Thank you everyone for their great contributions, online
collaborative discussions, awesome videos and for taking part. In addition to
the top 3 prizes, we’re excited that we have several other Special Award
Winners. Stay tuned for a follow-up blog article announcing these winners!
This is the second NXP HoverGames Challenge “Help Drones Help Others During
Pandemics”. Read more about the winners of the first challenge, “Fighting
Fires with Flyers,”
in our first blog.
Mobile Robotics, Drones and Rovers, Program Lead, System Innovations at NXP Semiconductor
Iain Galloway, P.Eng., holds an Electrical Engineering Degree from University of New Brunswick, Canada, and has more than 25 years of hands on experience as an electronics embedded designer and field support engineer. You can connect with Iain on Twitter at @iafgalloway.