Get Started with the MCSPTE1AK116
Contents of this document
-
Out of the Box
-
Get Software
-
Plug It In
-
Build
Sign in to save your progress. Don't have an account? Create one.
Purchase your S32K116 BLDC/PMSM Development Kit
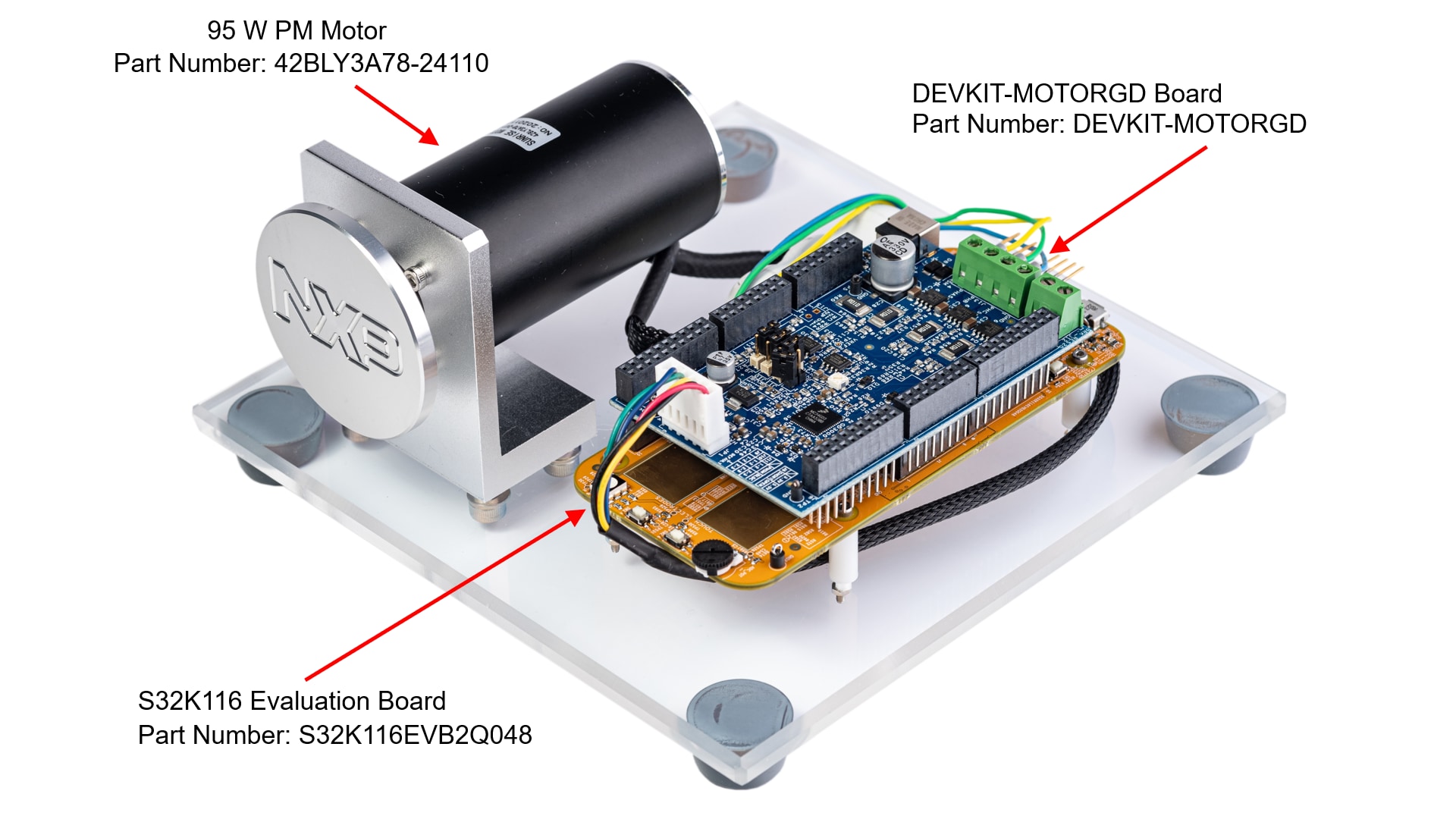
1. Out of the Box
1.1 Get to Know the Development Kit
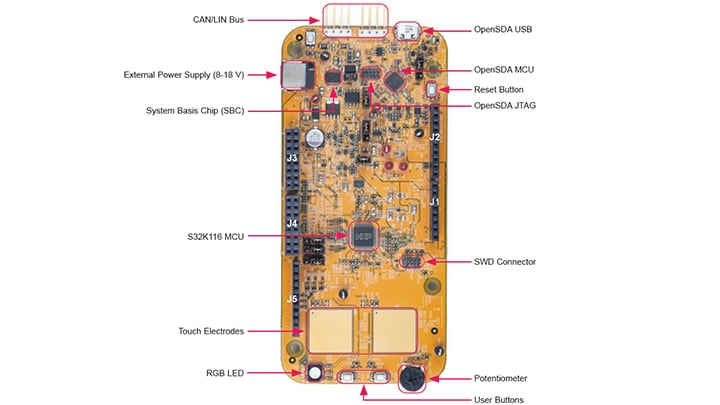
1.2 Get to Know the S32K116EVB evaluation board
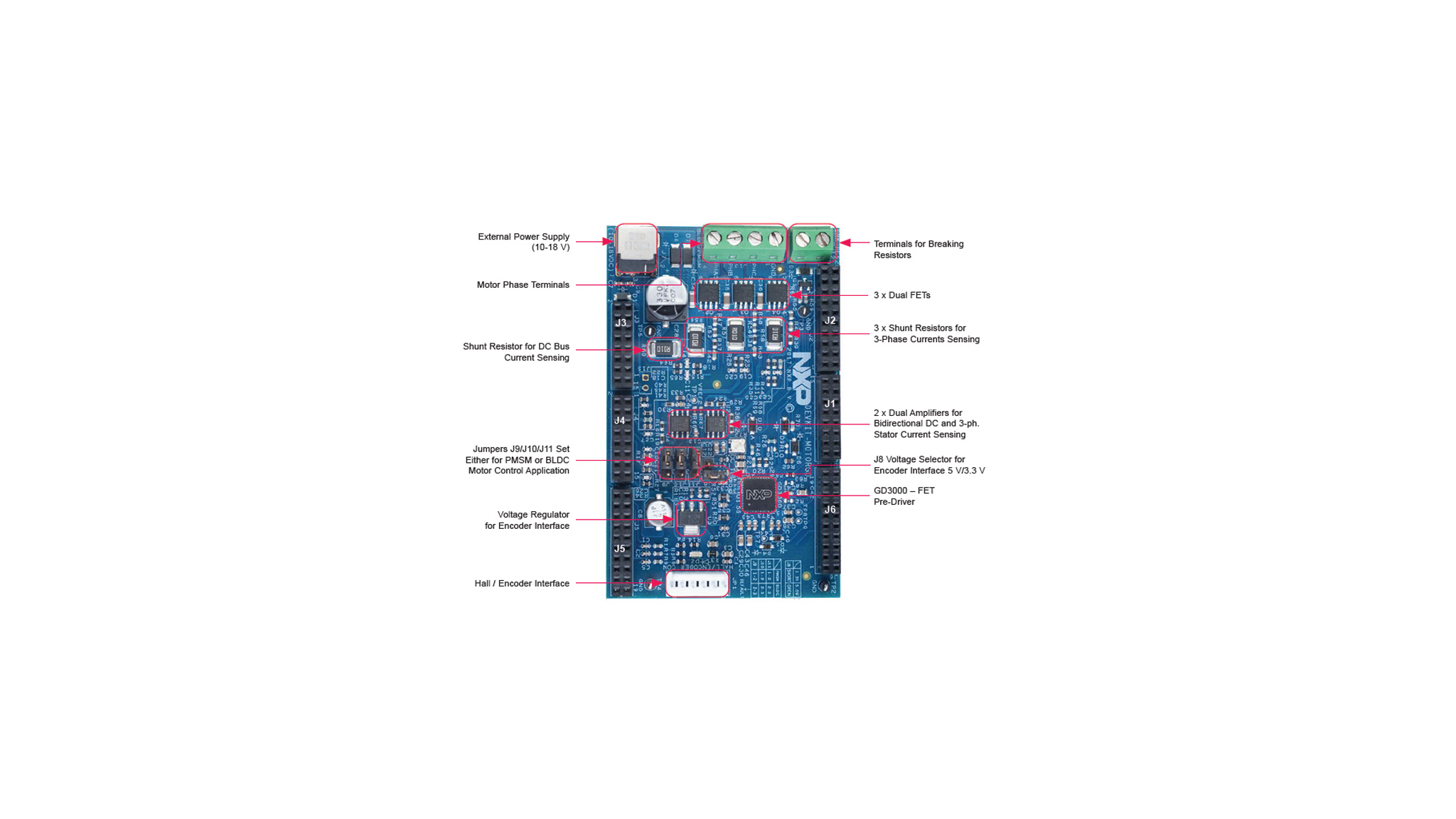
1.3 Get to Know the DEVKIT-MOTORGD
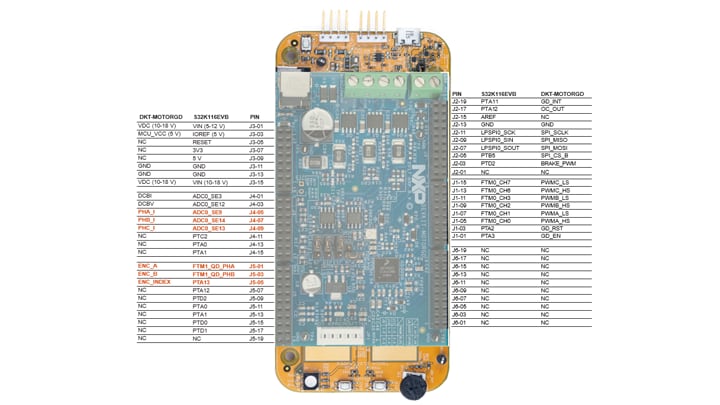
1.4 HEADER/PINOUT for PMSM Motor Control
S32K116EVB controls DEVKIT-MOTORGD through inner pins of the I/O headers.
Inner pins of the I/O headers are Arduino compatible. Pins in red are configure-able
This is the pin configuration for PMSM motor control:
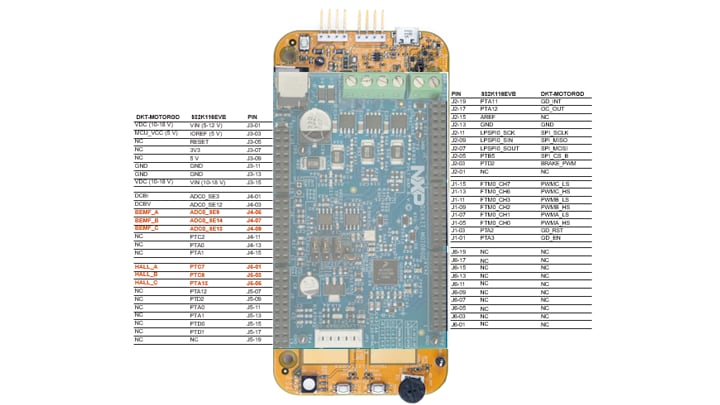
1.5 HEADER/PINOUT for BLDC Motor Control
S32K116EVB controls DEVKIT-MOTORGD through inner pins of the I/O headers.
Inner pins of the I/O headers are Arduino compatible. Pins in red are configure-able
This is the pin configuration for BLDC motor control:
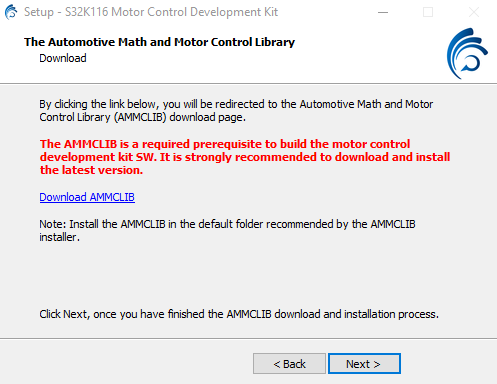
2. Get Software
2.1 Download the Development Kit - Application Software
The software package includes projects for most typical hardware configurations.
Download MCSPTE1AK116 Application SW

2.2 Get the Integrated Development Environment (IDE)
MCSPTE1AK116 performs better when using S32 Design Studio IDE for Arm®
Download S32 DESIGN STUDIO IDE
2.3 Get the Run-Time Debugging Tool
MCSPTE1AK116 evaluation board performs better when using the FreeMASTER tool for run-time debugging.
3. Plug It In
You can watch the video or follow the below step-by-step guide to set up your MCSPTE1AK116:
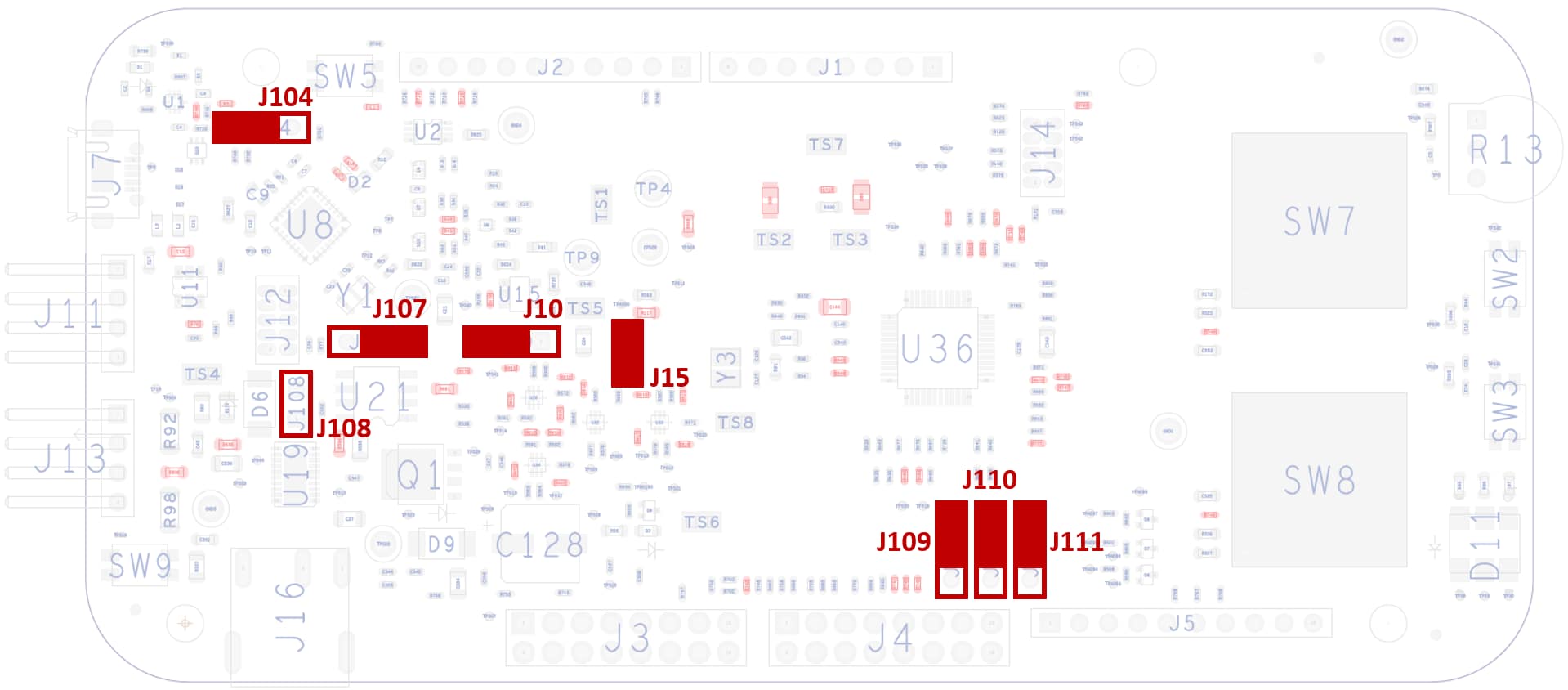
3.1 Set Up Jumpers in your S32K116EVB evaluation board
| Jumper | Setting | Option | Description |
|---|---|---|---|
J10 |
2-1 | MCU Voltage | MCU powered from 3.3 V |
| 2-3 | MCU powered from 5 V (default) | ||
J15 |
Open | MCU Current | Pins for current measurement for external amperemeter |
| Short | Measurement | Pins for current measurement shorted (default) | |
J104 |
2-1 | Reset Signal | Reset signal direct to the MCU, use to reset S32K116 (default) |
| 3-3 | Reset signal to OpenSDA, use to enter into Open SDA bootloader mode | ||
J107 |
2-1 | Board Input Power | EVB powered by 12 V power source (default) |
| 3-3 | EVB powered by USB micro connector | ||
J108 |
Open | LIN Mode | LIN Responder* mode (default) |
| Short | LIN Commander** mode | ||
J109 / J110 / J111 |
2-1 | Motor / RGB LED | Signals PTD15, PTD16 and PTE8 routed for PWM motor control (default) |
| 3-3 | Routing | Signals PTD15, PTD16 and PTE8 routed for RGB LED |
3.2 Set Up Jumpers in your DEVKIT-MOTORGD evaluation board
| Jumper | Setting | Option | Description |
|---|---|---|---|
J8 |
Short | HALL/Encoder interface | Voltage level for HALL/Encoder interface is 3.3 V |
| Open | Voltage level for HALL/Encoder interface is 5.0 V (default) | ||
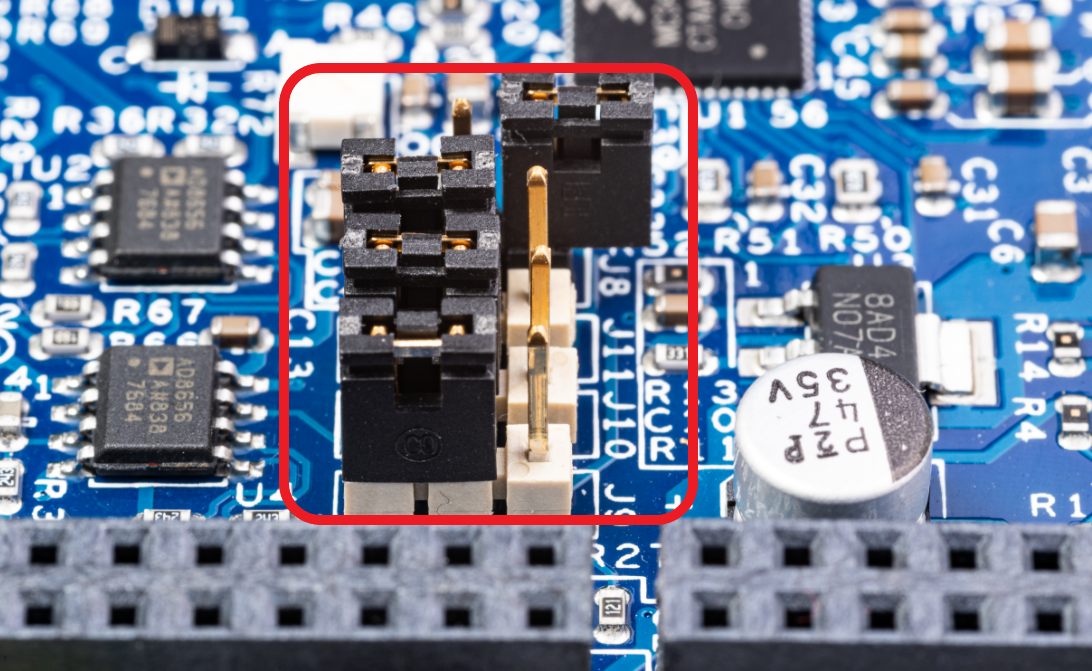
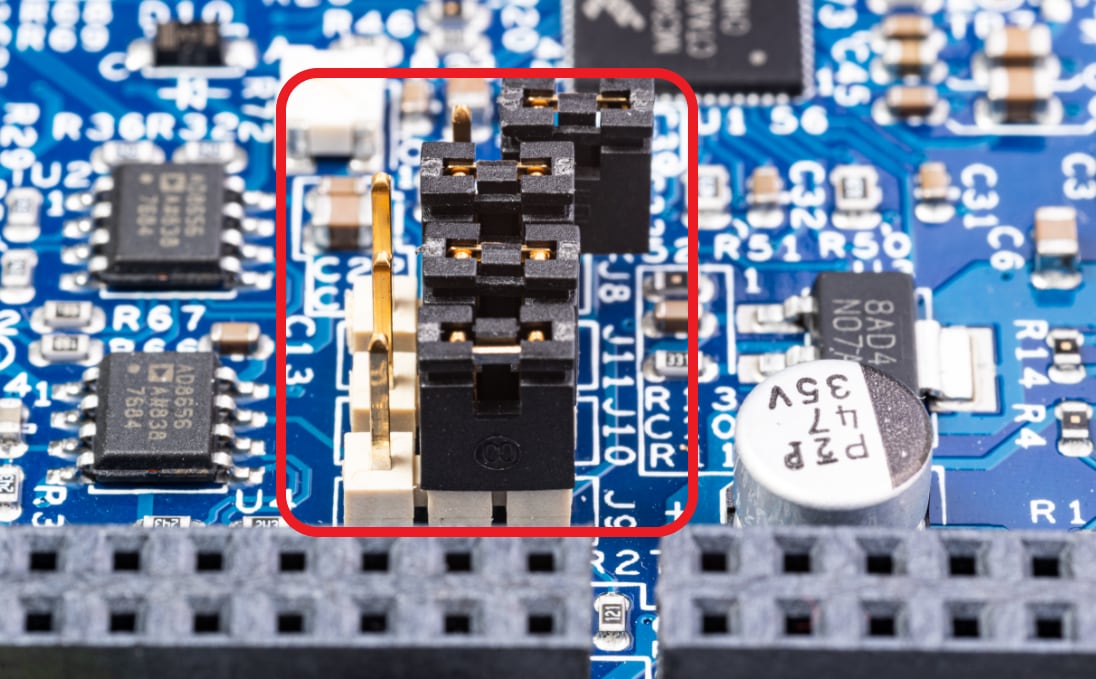
J9 / J10 / J11 |
1-2 | Motor Type | Bidirectional 3-phase current sensing for PMSM FOC (sinusoidal) motor control |
| 2-3 | 3-phase back-EMF voltage sensing for BLDC six-step (trapezoidal) sensorless motor control |
3.3 Configure S32K1116EVB and DEVKIT-MOTORGD Boards
Ensure default S32K116EVB and DEVKIT-MOTORGD jumper options.
Ensure jumper J107 in S32K116EVB and DEVKIT-MOTORGD is in position 1-2 for powering board from 12 V power supply.
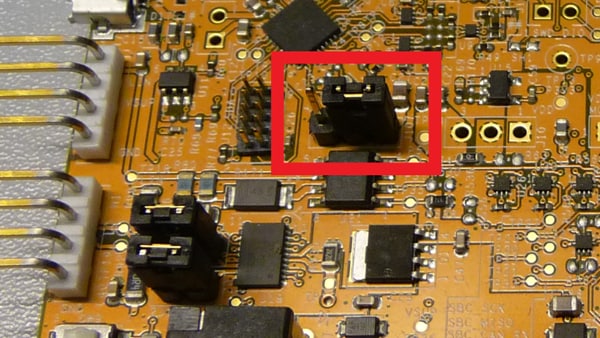
Place DEVKIT-MOTORGD jumpers J9, J10 and
J11 into position 1-2 for PMSM application or 2-3 for BLDC application. Jumper J8 stays
open for 5 V HALL sensors.
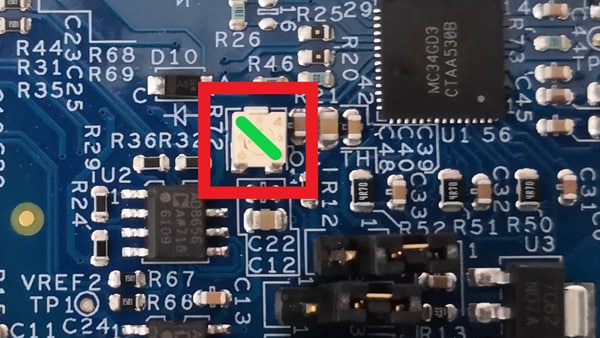
Make sure the potentiometer for overcurrent comparator is set in position (slightly to the left from the middle) for approximately 8 – 10 A.
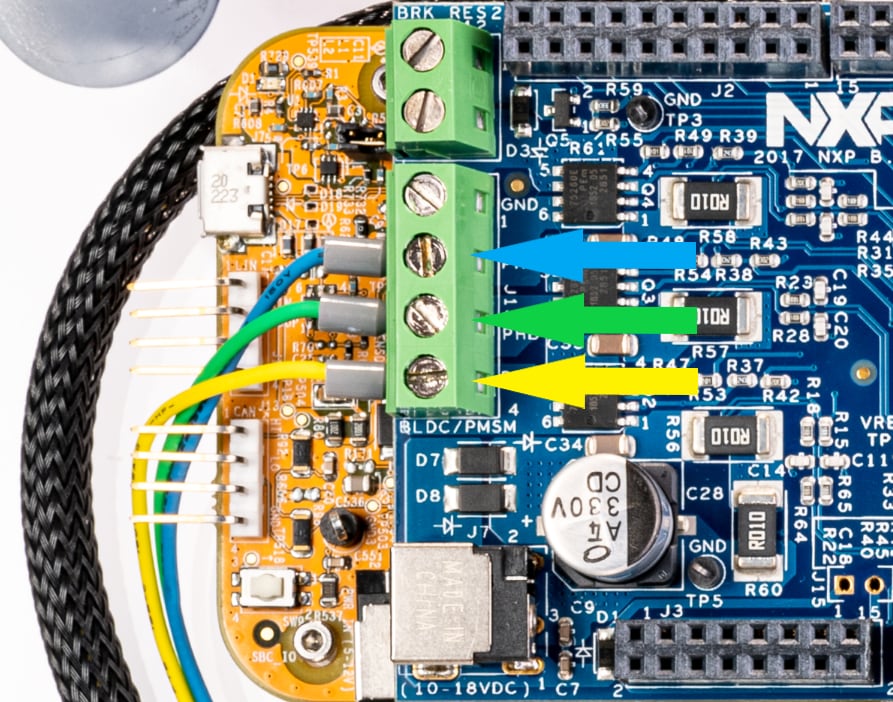
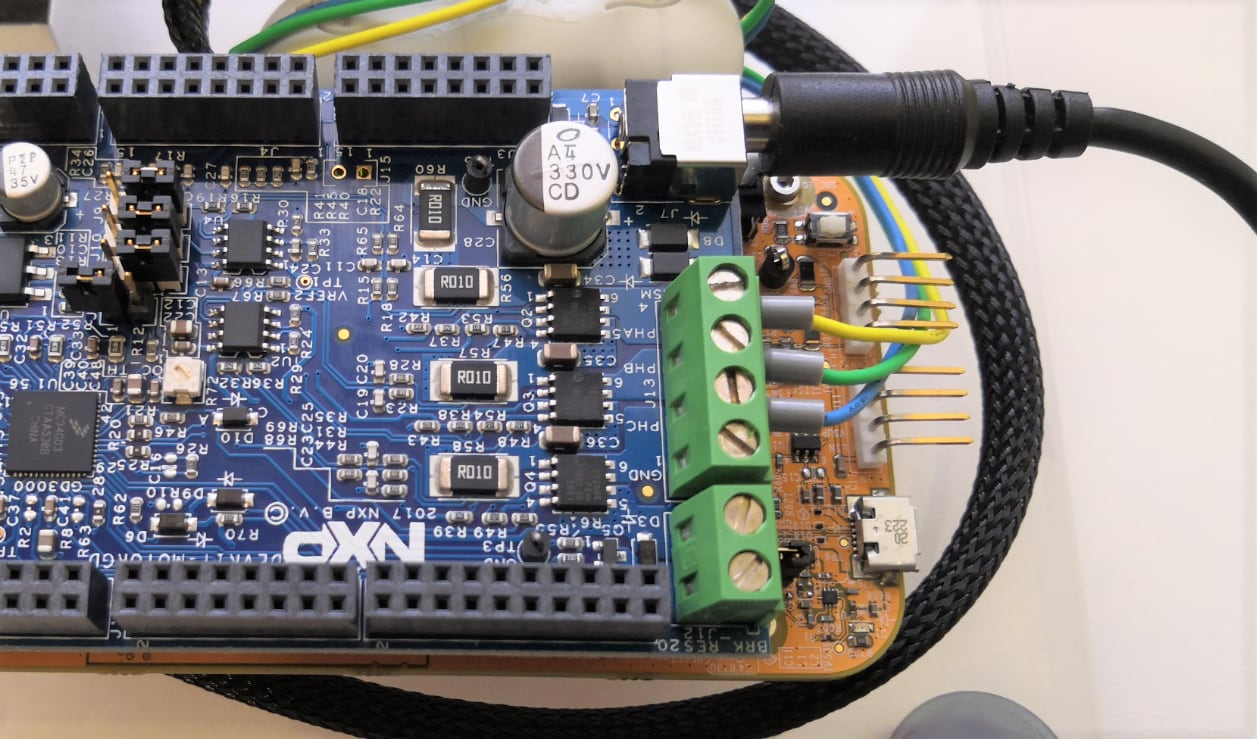
3.4 Plug the motor
Ensure that the motor phase wires are in the following order, from phase A to phase C:
- A: Yellow
- B: Green
- C: Blue
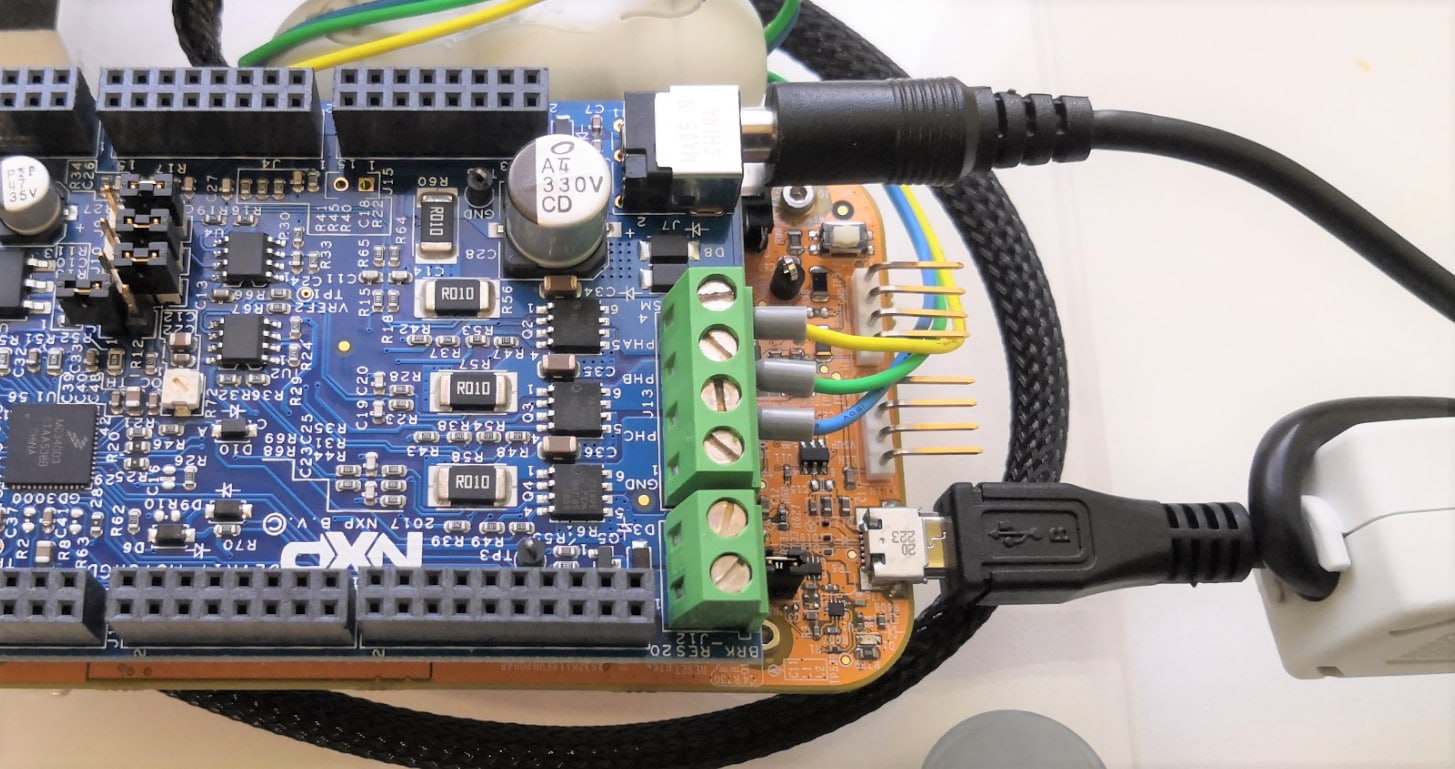
3.5 Plug in the Power Supply
3.6 Connect the USB Cable
Connect S32K116 board to the PC using the USB cable.
4. Build
4.1 Select Application and MCU Programing
Select the appropriate PMSM or BLDC motor control application from the installed directory: NXP\MCSPTE1AK116\sw
Program the MCU using S32 Design Studio:
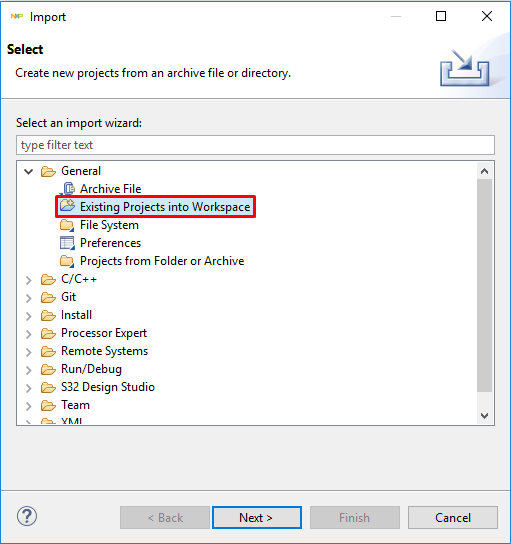
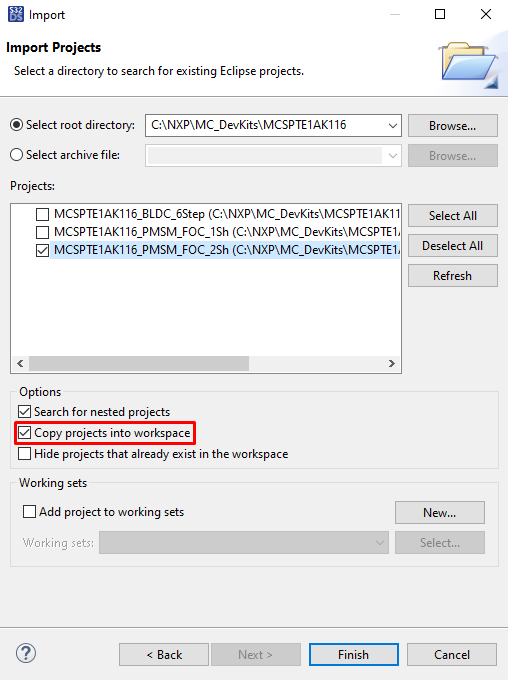
To import the installed application software project in the S32 Design Studio IDE for Arm®:
- Launch S32DS for Arm
- Go to File > Import, then select General > Existing Projects into Workspace
- Navigate to the installed application directory: .. MC_DevKits\MCSPTE1AK116\sw folder and choose appropriate project and click OK. Then, click Finish.
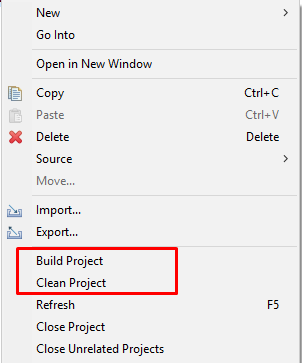
Optional: These steps should not be necessary since they are automatically executed next:
- Right click on the imported project and select Clean
- Right click on the imported project and select Build
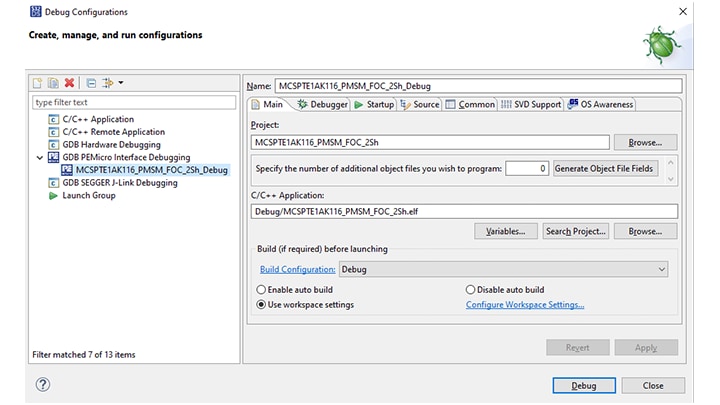
4.2 Debug and Load
In the S32 Design Studio menu click Run > Debug Configuration and select the predefined debug configuration and click on Debug to start loading built code into MCU.
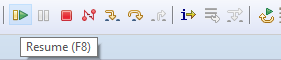
4.3 Let Code Run
To let the code run, click Resume (or press F8), and use Disconnect to avoid interference between the S32DS IDE debugger and the FreeMASTER tool.

4.4 Set Up the Debugging Tool
Launch the FreeMASTER application.
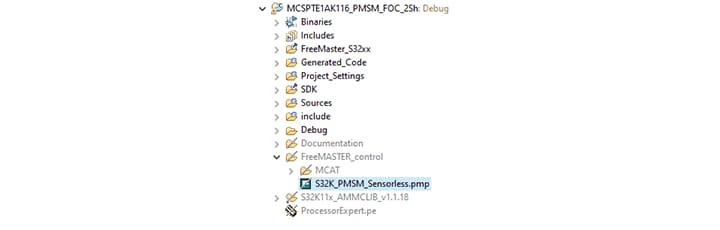
Click File > Open Project to open the *.pmp FreeMASTER project <selected project>\FreeMASTER_control,
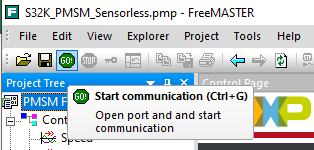
To enable communication, in the FreeMASTER tool bar, click Go (or press Ctrl+G).
Successful communication displays in the status bar at the bottom as:
RS232 UART Communication;COMn;speed = 38400
Application Control
Configure Motor Drive
Click the App Control tab on the Motor Control Application Tuning (MCAT) Tool menu to display the application control page.
Configure the motor rpms and turn on the motor drive.
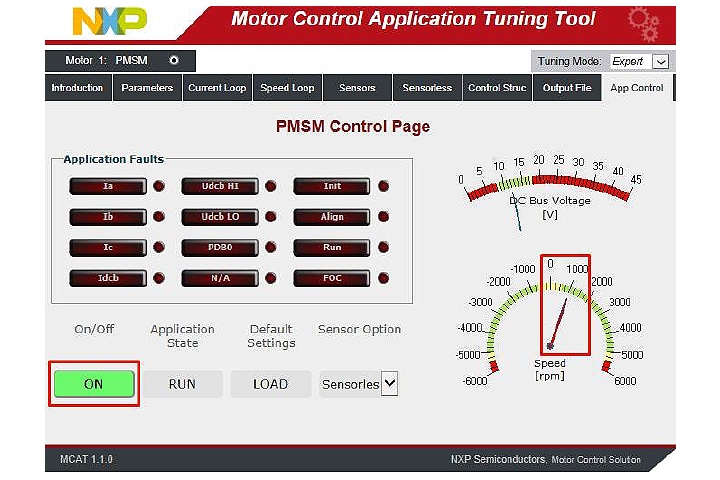
When the power supply is connected to the DEVKIT-MOTOGD board, the application is in a READY state.
Check Pending Faults
In case of pending faults, click the Clear FAULT on the FreeMASTER MCAT control page or alternatively press and simultaneously hold
SW2 and SW3 on the board.
Start Application
Click ON/OFF on the control page or press SW2/SW3 on the board to initiate clockwise/counterclockwise spinning of the
rotor.
Set Speed
Change the speed required variable to set the speed.
Go to the variable watch window by clicking speed gauge or by pressing the switch SW2/SW3.
Stop Application
Stop the application by clicking ON/OFF button on the FreeMASTER MCAT control page or simultaneously press and hold
SW2 and SW3 on the S32K116EVB board.
Design Resources
Chip Documents
- S32K1xx MCU Family – Data Sheet
- S32K1xx MCU Family – Reference Manual
- S32K1xx MCU Family – Functional Safety Documentation (requires access to the SafeAssure NDA group)
Support
Training
Forums
Connect with other engineers and get expert advice on designing with the MCSPTE1AK116 on one of our community sites.
On this page
- 1.1
Get to Know the Development Kit
- 1.2
Get to Know the S32K116EVB evaluation board
- 1.3
Get to Know the DEVKIT-MOTORGD
- 1.4
HEADER/PINOUT for PMSM Motor Control
- 1.5
HEADER/PINOUT for BLDC Motor Control
- 2.1
Download the Development Kit - Application Software
- 2.2
Get the Integrated Development Environment (IDE)
- 2.3
Get the Run-Time Debugging Tool
- 3.1
Set Up Jumpers in your S32K116EVB evaluation board
- 3.2
Set Up Jumpers in your DEVKIT-MOTORGD evaluation board
- 3.3
Configure S32K1116EVB and DEVKIT-MOTORGD Boards
- 3.4
Plug the motor
- 3.5
Plug in the Power Supply
- 3.6
Connect the USB Cable