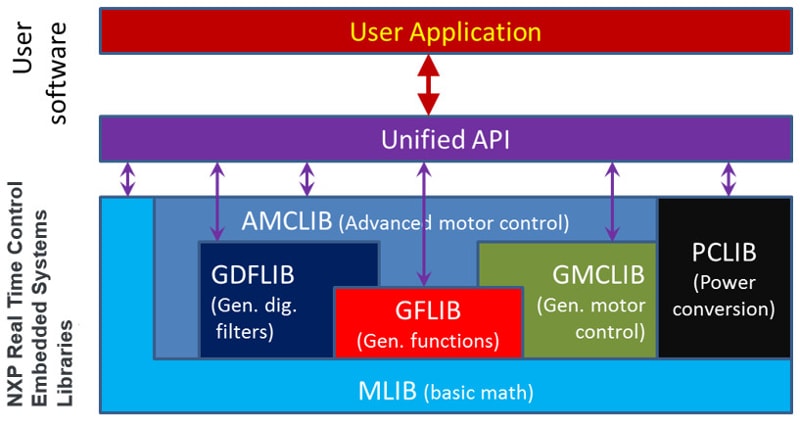
This NXP real-time control embedded software libraries – RTCESL (former
Freescale embedded software libraries – FSLESL) is a group of
algorithms ranging from basic mathematics operations to advanced
transformations and observers, which can be easily incorporated into complex
real-time control applications, and used in our motor control reference
designs. The algorithms help to speed development and ease of use in
applications that require intensive math computation and control such as
advanced high-efficiency motor control and power conversion.
The libraries are highly optimized, tested on our hardware and are easy to use
as they are implemented with a C-callable function interface. If the device
has a hardware accelerators for specific calculations like Memory-Mapped
Divide and Square Root Module (MMDVSQ) in some Cortex® M0+ core
based devices or PowerQuad (PQ) hardware accelerator in some Cortex® M33 core
based devices the RTCESL can process some algorithms using such hardware
accelerators to provide quicker calculations. The functions have been tested
against NXP's reference models in MATLAB.
The libraries are currently available for the Kinetis® Arm®
Cortex® M0+, M4, M7, M33 and DSCs with the DSP56800E(X) core, with the
introduction of a universal API across all our libraries we have made
available a tool to the help convert your API's. To quickly move from the API
that you used in either FSLESL 3.0 or MMCLIB to the new universal API used in
latest RTCESL release use
API Translator. This
simple tool will help migrate your code by converting your old API to the new
version. Available now in the Downloads tab.
 Evaluation and Development Boards
Evaluation and Development Boards Reference Design
Reference Design Reference Design
Reference Design Reference Design
Reference Design
.PNG?imwidth=300)