
Product Longevity
Participating products are available for a minimum of 10 years. Designated participating products developed for the automotive, telecom and medical segments are available for a minimum of 15 years.
For security on TJA1042, TJA1044, TJA1049, go to Secure CAN TJA1152, for higher data rates on these devices, go to CAN SIC TJA1462.
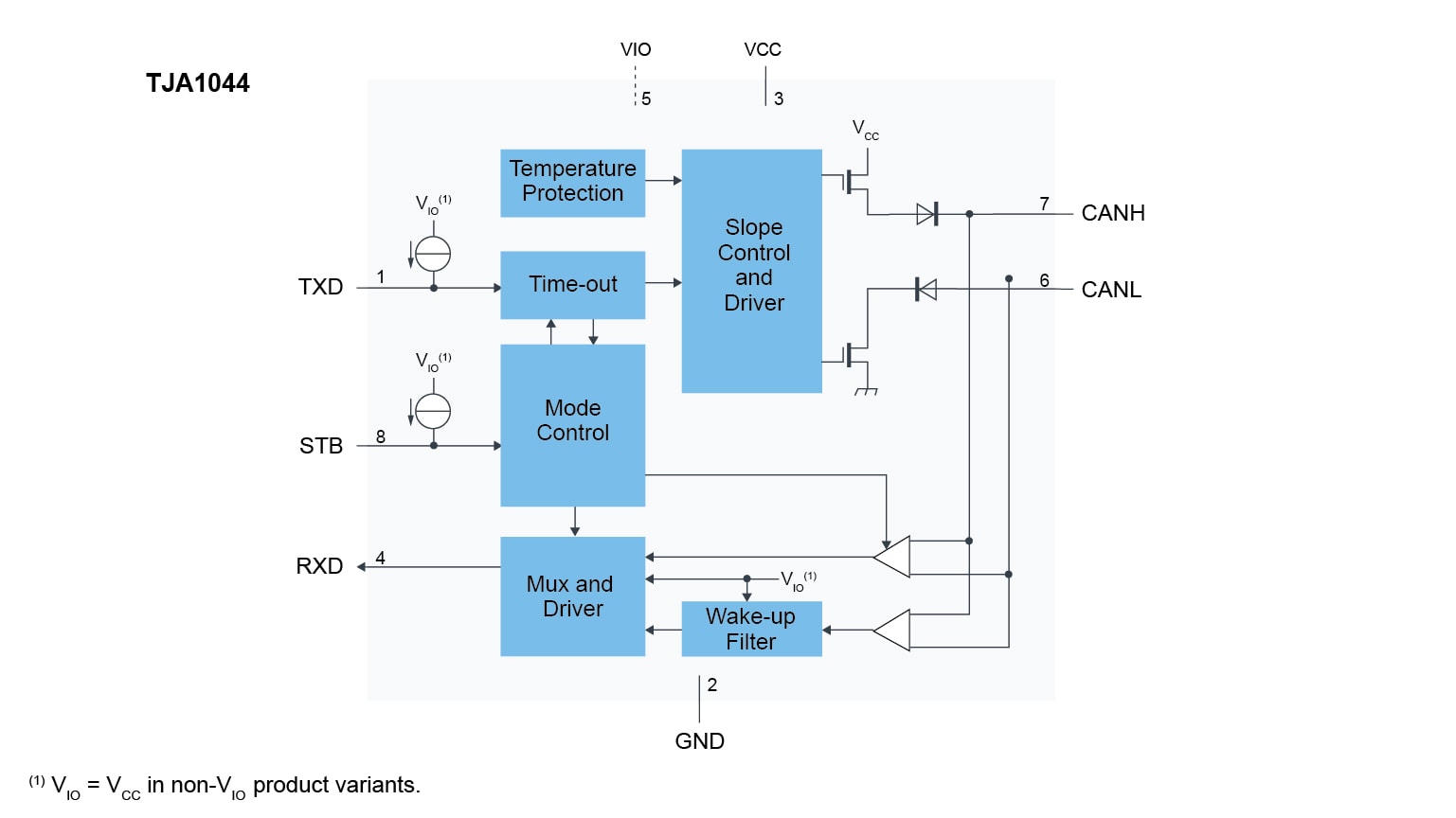
The TJA1044 is part of the Mantis family of high-speed CAN transceivers. It provides an interface between a controller area network (CAN) protocol controller and the physical two-wire CAN bus. The transceiver is designed for high-speed CAN applications in the automotive industry, providing the differential transmit and receive capability to (a microcontroller with) a CAN protocol controller. Ideal passive behavior to the CAN bus when the supply voltage is off.
A very low-current Standby mode with bus wake-up capability Excellent EMC performance, even without a common mode choke. Variants with a VIO pin can be interfaced directly with microcontrollers with supply voltages from 3.3 V to 5 V
These features make the TJA1044 an excellent choice for all types of HS-CAN networks, in nodes that require a low-power mode with wake-up capability via the CAN bus.
The TJA1044 implements the CAN physical layer as defined in the current 11898-2:2016 and SAE J2284-1 to SAE J2284-5. The TJA1044T is specified for data rates up to 1 Mbit/s. Additional timing parameters defining loop delay symmetry are specified for the other variants. This implementation enables reliable communication in the CAN FD fast phase at data rates up to 5 Mbit/s.
Participating products are available for a minimum of 10 years. Designated participating products developed for the automotive, telecom and medical segments are available for a minimum of 15 years.

High-Speed CAN Transceiver - Mantis Family
|
|
|
|
|
|
|
|---|---|---|---|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Quick reference to our documentation types
10 documents
Compact List
Receive the full breakdown. See the product footprint and more in the eCad file.
1-5 of 11 hardware offerings




To get further assistance directly from NXP, please see our Engineering Services.
3 engineering services

To find additional partner offerings that support this product, visit our Partner Marketplace.






